တိကျစွာထွင်းထုသည့်ထုထည်တွင် Hxdwh 23 bit absolute value ac servo motor LDD စီးရီးနှင့်ကိုက်ညီသောΩ m-n1 series servo driver
ဂဏန်းထိန်းချုပ်မှုထွင်းထုစက်၏လျှောက်လွှာ
CNC အင်ဂျင်နီယာနှင့်ကြိတ်စက်သည်စက်အမျိုးအစားတစ်ခုဖြစ်သည်။ သတ္တုနှင့်ဆိုင်သောထွင်းထုသည့်ထွင်းထုစက်ကိုသတ္တုမဟုတ်သောသတ္တုပြားများနှင့်ပိုက်များနှင့်အဆက်အသွယ်မရှိသောဖြတ်တောက်ခြင်းနှင့်တူးဖော်ခြင်းများတွင်အသုံးပြုနိုင်သည်။ အထူးသဖြင့်သံမဏိပြား၊ သံပြား၊ ဆီလီကွန်၊ ကြွေထည်၊ တိုက်တေနီယမ်သတ္တုစပ်၊ epoxy၊ A3 သံမဏိ၊ ၎င်းသည် CNC စနစ်ဖြင့် multi axis interpolation ရှိသောတိကျသောစက်ကိရိယာဖြစ်သည်။ ပစ္စည်းကိရိယာများသည်တည်ငြိမ်။ ယုံကြည်စိတ်ချရသောလည်ပတ်မှု၊ အရည်အသွေးကောင်းမွန်သောအရည်အသွေး၊ မြင့်မားသောလုပ်ဆောင်မှု၊ ကြိတ်ခွဲခြင်း၊ တူးဖော်ခြင်း၊ ကြိတ်ခြင်းနှင့်အခြားနည်းလမ်းများမှတဆင့် 3C၊ တိကျသောပွန်းပဲ့ဆေး၊ ဆေးဘက်ဆိုင်ရာနှင့်အခြားနယ်ပယ်များတွင်ကျယ်ကျယ်ပြန့်ပြန့်အသုံးပြုကြသည်။ 5g စက်မှုလုပ်ငန်းများမြင့်တက်လာခြင်းနှင့်အတူ 3C စက်မှုလုပ်ငန်းတွင်၎င်း၏ဈေးကွက်သည်အထူးသဖြင့်ကြီးမားသည်။
Hxdwh LDD servo motor & -m-N1 Servo Ωm-N1 ပြီးပြည့်စုံသောပွဲစဉ်
S ummary:
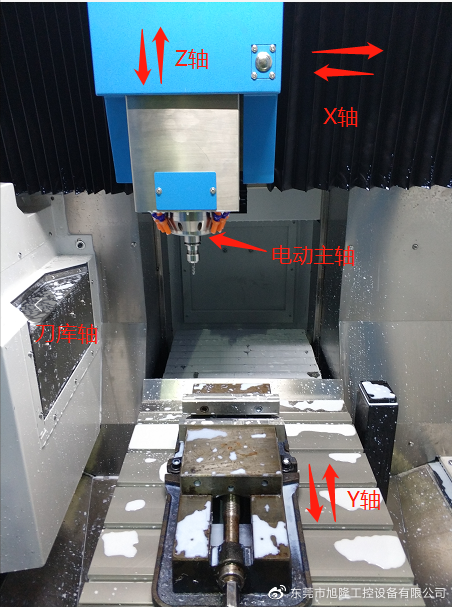
ထွင်းထုစက်၏ဘုံဖွဲ့စည်းမှုကိုဘယ်ဘက်ရှိပုံတွင်ပြထားသည်။ လက်ဝဲနှင့်လက်ယာရွေ့လျားနေသော X ဝင်ရိုး၊ Y ဝင်ရိုးသည်အရှေ့သို့ရွေ့လျားသည်၊ Z ဝင်ရိုးသည်တက်။ ရွေ့လျားခြင်း၊ မြန်နှုန်းမြင့်လှည့်လည်တံနှင့်ကိရိယာမဂ္ဂဇင်းဝင်ရိုးအပါအ ၀ င်။ အော်တို tool ကိုပြောင်းလဲမှုအတွက်) ။ X၊ y, Z နှင့် t ပုဆိန်များကို servo မှထိန်းချုပ်ပြီးအဓိက ၀ င်ရိုးကို frequency converter ဖြင့်ထိန်းချုပ်သည်။ အပြည့်အစုံကို (မိုဘိုင်းဖုန်းသော့၊ ဖန်ခွက်အဖုံး၊ သတ္တုဘောင်) တွင်အစိတ်အပိုင်းများ (မိုဘိုင်းဖုန်းသော့များ၊ ဖန်အဖုံးပြား၊ သတ္တုဘောင်) များက XYZ triaxial ၏မြန်ဆန်ပြီးတည်ငြိမ်သောတုန့်ပြန်မှု၏အကူအညီဖြင့်ပြုပြင်ထားသောအစိတ်အပိုင်းများကိုစားပွဲပေါ်မှာတပ်ဆင်ထားသည်။ မိုဘိုင်းဖုန်းအပြောင်းအလဲနဲ့အတွက်၎င်း၏ပါဝင်မှုရှိသည်။
အစီအစဉ်မိတ်ဆက်
အသုံးပြုခြင်း Ωမီတာ-n1 စီးရီးပေါင်းစုံဝင်ရိုး servo drive ကိုကိုက်ညီခြင်း H ကို xdwh LDD စီးရီး 23 အကြွင်းမဲ့အာဏာတန်ဖိုးကို ac servo motor ကိုကိုက်, စနစ် EtherCAT ဘတ်စ်ကားဆက်သွယ်ရေးချမှတ်။ ၎င်းသည် DC bus power архитекторကို အသုံးပြု၍ drive unit များ၏ကက်စကိတ်စွမ်းအားကိုထောက်ပံ့သည်။ ၎င်းကိုပုဆိန်သုံးပုဒ်သို့မဟုတ်လေးမျိုးနှင့်ပေါင်းစပ်နိုင်သည်။ ဖောက်သည်များ၏ကွဲပြားခြားနားသောလျှောက်လွှာအခြေအနေများ၏လိုအပ်ချက်များကိုဖြည့်ဆည်းရန်၎င်းကိုပြောင်းလွယ်ပြင်လွယ်စိတ်ကြိုက်ပြုပြင်နိုင်သည်။
လျှပ်စစ်ဖွဲ့စည်းပုံ
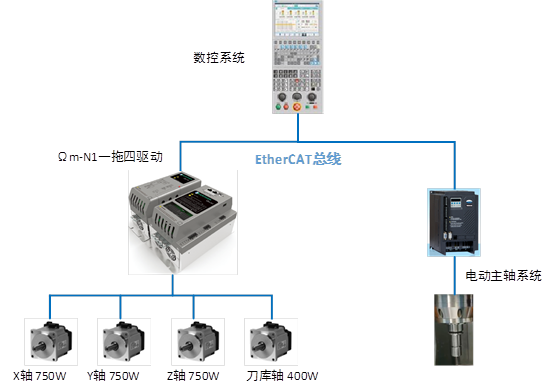
Hxdwh 23 bit servo motor ထွင်းထုစက်၏လျှပ်စစ်ဖွဲ့စည်းမှုကိုအသုံးပြုသည်

23 bit အကြွင်းမဲ့အာဏာတန်ဖိုး Hxdwh servo မော်တာ 400W 750W 13925507910

-m-N1 Multi axes bus driver 13925507910
CNC စနစ်ကို EtherCAT ဘတ်စ်ကားမှတဆင့် drive m-n1 drive တစ်ခုနှင့်မောင်းနှင်မှုလေးခုနှင့်လျှပ်စစ်ဗိုင်းလိပ်တံစနစ်တို့ဖြင့်ချိတ်ဆက်ထားသည်။ drive တစ်ခု၏လေး drive အောက်တွင်စနစ်သည် X-axis 750W၊ Y-axis 750W, z-axis 750W နှင့်မဂ္ဂဇင်းဝင်ရိုး 400W ကိုထိန်းချုပ်သည်။
အစီအစဉ်၏အင်္ဂါရပ်များ
- Form အားသာချက်
application m-n1 လေး ၀ င်ရိုးပေါင်းစည်းခြင်း၊ ဤအပလီကေးရှင်းတွင်လက်ဝဲ - ညာရွေ့လျားနေသော x-axis၊ နောက်ကျော -to-back y-axis, up-down ရွေ့လျားနေသော Z-axis နှင့်အလိုအလျှောက်ကိရိယာပြောင်းလဲမှုအတွက် tool မဂ္ဂဇင်းဝင်ရိုးအားလုံးသည်။ servo ကထိန်းချုပ်ထားပြီး၊ မျိုးစုံယာဉ်မောင်းများအသုံးပြုသောလယ်သည်ယခုတွင် multi axis bus bus တစ်ခုသာလိုအပ်သည်။ ထို့အပြင် drive ၄ ခု drive သည်မြင့်မားသော synchronous စွမ်းဆောင်ရည်ရှိပြီးဆက်သွယ်မှုနှောင့်နှေးခြင်းမရှိဘဲချွေတာပြီးအကျိုးရှိသည်။
- အရွယ်အစားသေးငယ်သည်
Ω m-n1 သည်အရွယ်အစားသေးငယ်။ လျှောက်လွှာတင်သောနေရာအတွက်ကျဉ်းမြောင်းသောနေရာများအတွက်နေရာချွေတာသည်။ ထို့အပြင်မတူညီသောတပ်ဆင်နည်းသုံးမျိုးရှိပါသည်။
- စွမ်းဆောင်ရည်မြင့်
EtherCAT bus ၏အချိန်နှင့်တပြေးညီစွမ်းဆောင်ရည်၊ Ωမီတာနှင့် Huada LDD မော်တာများ၏တုန့်ပြန်မှုနှင့်တည်ငြိမ်မှုတို့ကြောင့်စနစ်တစ်ခုလုံး၏စက်၏တိကျမှန်ကန်မှုကိုအာမခံသည်။ ထို့အပြင်Ω m-n1 ဘတ်စ်ကားမောင်းသူသည် hardware current ကိုလက်ခံသည်။ အလွန်ကောင်းမွန်သော current loop response သည်တုန့်ပြန်မှု၏အာမခံချက်ဖြစ်သည်။
- အလိုက် filtering ကို algorithm ကို
ပစ္စည်းများ၏ X, y နှင့် Z ပုဆိန်များကိုဝက်အူလှည့်ဖြင့်မောင်းနှင်သည်။ စနစ်အတွင်းရှိပဲ့တင်ရိုက်ခတ်မှုအချက်များ၏ဝင်ရောက်စွက်ဖက်မှုအလွန်တိကျမှန်ကန်မှုနှင့်မျက်နှာပြင်ချောမွေ့အကျိုးသက်ရောက်စေပါလိမ့်မယ်။ adaptive filtering ကိုမောင်းနှင်သော m-n1 ၏ algorithm သည် system ပေါ်ရှိပဲ့တင်ရိုက်ခတ်မှုအချက်များကိုအလိုအလျောက်ခွဲခြားသတ်မှတ်နိုင်ပြီးစနစ်၏စက်များ၏တိကျမှုအတွက်အမြင့်ဆုံးသောအာမခံချက်ကိုပေးသည်။
စီမံကိန်းအခက်အခဲများ
ထွင်းထုစက်လုပ်ငန်းအတွက် quadrant ပုံစံသည်သတ္တုထုတ်လုပ်မှုတွင်ခေါင်းကိုက်သည်။ အဓိကအကြောင်းပြချက်မှာ interpolation shaft ၏တုန့်ပြန်မှုသည်ကိုက်ညီသောအပြောင်းအလဲဖြစ်စဉ်အတွင်းရှိနောက်ပြန်ဆုတ်သည့်နေရာ၌အနည်းငယ်နောက်ကျကျန်နေသည်။
လျှောက်လွှာအကျိုးသက်ရောက်မှု
- Ω m-n1 မောင်းနှင်သူ၏ quadrant bulge ဖိနှိပ်မှု function သည် quadrant ဂယက်ထခြင်းပြtheနာကိုထိရောက်စွာဖြေရှင်းနိုင်သည်။
- ထို့အပြင်ခုနှစ်, fi m-n1 ကိုလည်း tool ကိုပုံစံ၏ပြproblemနာကိုဖြေရှင်းနိုင်မှအကောင်းဆုံးဖြစ်ပါတယ်။ torque လေ့လာသူ၏အကူအညီဖြင့်စက်လည်ပတ်မှုဖြစ်စဉ်၏လည်ပတ်မှုသည် ၁% အတွင်းတွင်ရှိသည်။
- အထူးစိတ်ကြိုက်ဗိုင်းလိပ်တံတိုက်ဖျက်ရေးလုပ်ဆောင်ချက်သည် torque အပြောင်းအလဲကိုအချိန်နှင့်အမျှစောင့်ကြည့်ရန်နှင့်တိုက်မိသည့်အချိန်တွင်ချက်ချင်းရပ်တန့်ရန်တီထွင်ထုတ်လုပ်ထားပြီးလယ်ကွင်းလုပ်ငန်းစဉ်တွင်မလျော်ကန်သောလည်ပတ်မှုကြောင့်ဖြစ်ပေါ်သောတိုက်မိခြင်းပြproblemနာကိုဖြေရှင်းနိုင်သည်။

တိကျသောထွင်းထုသည့်စက် 139x507910 တွင် Hxdwh ac servo မော်တာအသုံးပြုခြင်း

ပိုမိုသိရှိလိုပါက 。13925507910
post အချိန်: သြဂုတ် -10-2020