ຄໍາຮ້ອງສະຫມັກຂອງ Hxdwh 23 bit ມູນຄ່າຢ່າງແທ້ຈິງ ac servo motor LDD series series matching m-n1 series servo driver in precision carving machine
ການ ນຳ ໃຊ້ເຄື່ອງແກະສະຫຼັກຄວບຄຸມຕົວເລກ
ເຄື່ອງຈັກແລະເຄື່ອງຈັກ CNC ແມ່ນເຄື່ອງມືເຄື່ອງ CNC. ເຄື່ອງແກະສະຫຼັກທີ່ມີຄວາມແມ່ນ ຍຳ ໂລຫະສາມາດໃຊ້ ສຳ ລັບການຕັດທີ່ບໍ່ຕິດຕໍ່ແລະເຈາະໂລຫະຫຼືແຜ່ນແລະທໍ່ທີ່ບໍ່ແມ່ນໂລຫະ. ມັນເຫມາະສົມໂດຍສະເພາະ ສຳ ລັບການຕັດເລເຊີຂອງເຫລັກສະແຕນເລດ, ແຜ່ນເຫຼັກ, ຊິລິໂຄນຊິບ, ຊິບເຊລາມິກ, ໂລຫະປະສົມ titanium, ໂລຫະປະສົມ epoxy, ເຫລັກ A3, ເພັດແລະວັດສະດຸອື່ນໆ. ມັນແມ່ນອຸປະກອນເຄື່ອງຈັກທີ່ມີຄວາມແມ່ນ ຍຳ ແລະມີການຕີຄວາມ ໝາຍ ຫລາຍແກນໂດຍລະບົບ CNC. ອຸປະກອນມີຂໍ້ດີຂອງການ ດຳ ເນີນງານທີ່ ໝັ້ນ ຄົງແລະເຊື່ອຖືໄດ້, ຄຸນນະພາບການປະມວນຜົນທີ່ດີ, ມີປະສິດທິພາບສູງ, ການ ດຳ ເນີນງານງ່າຍດາຍແລະການ ບຳ ລຸງຮັກສາທີ່ສະດວກ. ຜ່ານການຜະລິດ, ການເຈາະ, ການເຈາະແລະວິທີການອື່ນໆ, ມັນໄດ້ຖືກ ນຳ ໃຊ້ຢ່າງກວ້າງຂວາງໃນ 3C, ການ ກຳ ຈັດຄວາມແມ່ນ ຍຳ, ດ້ານການແພດແລະດ້ານອື່ນໆ. ດ້ວຍການເຕີບໃຫຍ່ຂອງອຸດສະຫະ ກຳ 5g, ຕະຫຼາດໃນອຸດສະຫະ ກຳ 3C ແມ່ນໃຫຍ່ຫຼວງໂດຍສະເພາະ.
Hxdwh LDD servo ມໍເຕີແລະΩm-N1 ຂັບລົດ Servo matchm-N1 ກົງກັນທີ່ສົມບູນ
S ummary:
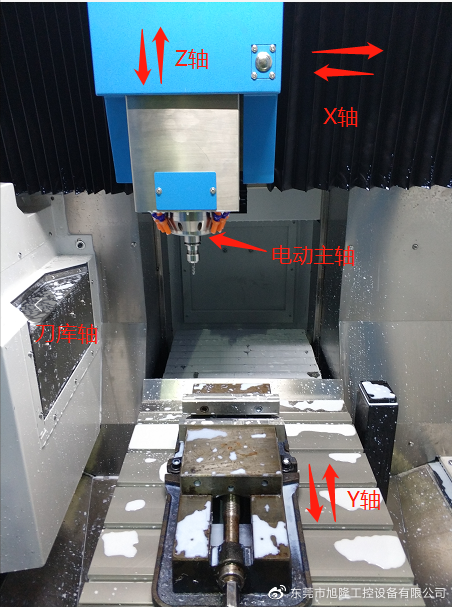
ສ່ວນປະກອບທົ່ວໄປຂອງເຄື່ອງແກະສະຫຼັກແມ່ນສະແດງຢູ່ໃນຮູບທາງເບື້ອງຊ້າຍ, ລວມທັງແກນ X ເຄື່ອນຍ້າຍຊ້າຍແລະຂວາ, ແກນ Y ເຄື່ອນຍ້າຍກັບຄືນໄປບ່ອນແລະແກນ, ແກນ Z ເຄື່ອນຍ້າຍຂຶ້ນແລະລົງ, ແກນຫມູນວຽນຄວາມໄວສູງແລະແກນວາລະສານເຄື່ອງມື (ແກນ t ) ສຳ ລັບການປ່ຽນເຄື່ອງມືອັດຕະໂນມັດ. ແກນ X, y, Z ແລະ t ຖືກຄວບຄຸມໂດຍ servo, ແລະແກນຕົ້ນຕໍແມ່ນຄວບຄຸມໂດຍຕົວປ່ຽນຄວາມຖີ່. ຊິ້ນສ່ວນປະມວນຜົນແມ່ນມີການສ້ອມແຊມໃນໂຕະເຮັດວຽກໂດຍການຕິດຕັ້ງ, ໂດຍການຊ່ວຍຕອບສະ ໜອງ ໄດ້ໄວແລະ ໝັ້ນ ຄົງຂອງ XYZ triaxial, ເພື່ອຮັບປະກັນຜົນກະທົບທີ່ມີຄວາມລະອຽດສູງ, ສ່ວນປະກອບສ່ວນໃຫຍ່ (ປຸ່ມໂທລະສັບມືຖື, ແຜ່ນປົກແກ້ວ, ກອບໂລຫະ) ໃສ່ ໂທລະສັບມືຖືມີສ່ວນຮ່ວມໃນການປຸງແຕ່ງ.
ການແນະ ນຳ ແບບແຜນ
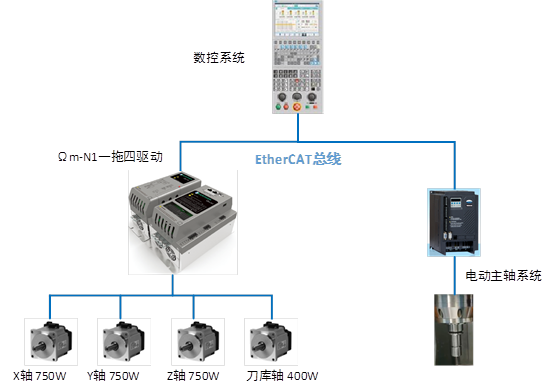
ການ ນຳ ໃຊ້ Ωm-n1 ຊຸດຫຼາຍເສັ້ນ servo drive ທີ່ກົງກັບ H xdwh LDD ຊຸດ 23 bit ມູນຄ່າແທ້ໆ ac servo ມໍເຕີ, ລະບົບຮັບຮອງເອົາການສື່ສານລົດເມ EtherCAT. ມັນຮັບຮອງເອົາສະຖາປັດຕະຍະ ກຳ ໄຟຟ້າຂອງລົດເມ DC ແລະສະ ໜັບ ສະ ໜູນ ການສະ ໜອງ ພະລັງງານຂອງເຄື່ອງຂັບຫຼາຍໆ ໜ່ວຍ. ມັນສາມາດປະສົມປະສານກັບສາມແກນຫຼືສີ່ແກນ. ມັນສາມາດປັບແຕ່ງໄດ້ຢ່າງຄ່ອງແຄ້ວເພື່ອຕອບສະ ໜອງ ຄວາມຮຽກຮ້ອງຕ້ອງການຂອງສະຖານະການການ ນຳ ໃຊ້ທີ່ແຕກຕ່າງກັນຂອງລູກຄ້າ.
ການຕັ້ງຄ່າໄຟຟ້າ
ການຕັ້ງຄ່າໄຟຟ້າຂອງເຄື່ອງຈັກແກະສະຫຼັກມໍເຕີ Hxdwh 23 bit

23 ມູນຄ່າສົມບູນ Hxdwh servo motor 400W 750W 13925507910

busm-N1 ຄົນຂັບລົດເມຫຼາຍແກນ 13925507910
ລະບົບ CNC ແມ່ນເຊື່ອມຕໍ່ກັບລະບົບΩ m-n1 ໜຶ່ງ ຂັບສີ່ລະບົບແລະລະບົບ spindle ໄຟຟ້າຜ່ານລົດເມ EtherCAT. ພາຍໃຕ້ການຂັບດຽວສີ່ແຍກ, ລະບົບຄວບຄຸມ X-axis 750W, Y-axis 750W, ແກນ z-axis 750W ແລະແກນວາລະສານ 400W.
ລັກສະນະຂອງໂຄງການ
- ປະໂຫຍດແບບຟອມ
integration m-n1 ການປະສົມປະສານສີ່ແກນ, ໃນແອບພິເຄຊັນນີ້, ແກນ x ຍ້າຍຊ້າຍ - ຂວາ, ແກນ y-back-back, ການເຄື່ອນຍ້າຍລົງ Z-axis ແລະແກນວາລະສານເຄື່ອງມື ສຳ ລັບການປ່ຽນເຄື່ອງມືອັດຕະໂນມັດແມ່ນທັງ ໝົດ ຄວບຄຸມໂດຍ servo, ແລະສະ ໜາມ ທີ່ໃຊ້ຄົນຂັບລົດຫຼາຍປະຈຸບັນຕ້ອງການຄົນຂັບລົດເມຫຼາຍແກນດຽວ. ຍິ່ງໄປກວ່ານັ້ນ, ຂັບລົດ ໜຶ່ງ ຄັນມີປະສິດຕິພາບສູງ, ບໍ່ມີການຊັກຊ້າໃນການສື່ສານ, ເຊິ່ງປະຫຍັດແລະປະສິດທິຜົນ.
- ຂະ ໜາດ ນ້ອຍ
Ω m-n1 ມີຂະ ໜາດ ນ້ອຍ, ເຊິ່ງປະຫຍັດພື້ນທີ່ ສຳ ລັບສະຖານທີ່ສະ ໝັກ ດ້ວຍສະຖານທີ່ແຄບ. ແລະມີສາມວິທີການຕິດຕັ້ງທີ່ແຕກຕ່າງກັນ, ງ່າຍຕໍ່ການຕິດຕັ້ງແລະໃຊ້ງ່າຍ.
- ປະສິດທິພາບທີ່ເຂັ້ມແຂງ
ດ້ວຍການປະຕິບັດຕົວຈິງຂອງລົດເມ EtherCAT ແລະຄວາມຮັບຜິດຊອບແລະຄວາມ ໝັ້ນ ຄົງຂອງມໍເຕີມໍເຕີແລະ Huada LDD, ຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກຂອງລະບົບທັງ ໝົດ ແມ່ນຮັບປະກັນ. ນອກຈາກນັ້ນ, ຄົນຂັບລົດເມΩ m-n1 ຮັບຮອງເອົາວົງຈອນປະຈຸບັນຂອງຮາດແວ, ແລະການຕອບສະ ໜອງ ວົງຈອນທີ່ດີເລີດໃນປະຈຸບັນແມ່ນການຮັບປະກັນຄວາມຮັບຜິດຊອບ.
- ລະບົບການກັ່ນຕອງທີ່ປັບຕົວໄດ້
ແກນ X, y ແລະ Z ຂອງອຸປະກອນແມ່ນຖືກຂັບເຄື່ອນໂດຍສະກູ. ການແຊກແຊງຂອງຈຸດ resonance ໃນລະບົບຈະມີຜົນກະທົບຢ່າງຫຼວງຫຼາຍຕໍ່ຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກແລະຄວາມລຽບຂອງພື້ນຜິວ. ສູດການຄິດໄລ່ຂອງການກັ່ນຕອງປັບຕົວຂັບຂີ່Ω m-n1 ສາມາດ ກຳ ນົດຈຸດທີ່ຢູ່ໃນລະບົບໂດຍອັດຕະໂນມັດ, ແລະສະກັດກັ້ນຈຸດທີ່ສະທ້ອນໄດ້ຢ່າງມີປະສິດຕິຜົນ, ໃຫ້ການຄ້ ຳ ປະກັນທີ່ ເໝາະ ສົມທີ່ສຸດ ສຳ ລັບຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກຂອງລະບົບ.
ຄວາມຫຍຸ້ງຍາກຂອງໂຄງການ
ສຳ ລັບອຸດສາຫະ ກຳ ເຄື່ອງແກະສະຫຼັກ, ຮູບຊົງສີ່ຫລ່ຽມແມ່ນຄວາມເຈັບຫົວໃນການປະມວນຜົນໂລຫະ. ເຫດຜົນຕົ້ນຕໍແມ່ນວ່າການຕອບສະ ໜອງ ຂອງການຕີຄວາມ ໝາຍ ຂອງເພົາຕະຫຼອດເວລາມີການປ່ຽນແປງເລັກນ້ອຍໃນຈຸດເວລາທີ່ປ່ຽນ ໃໝ່ ໃນລະຫວ່າງການປະມວນຜົນການຈັບຄູ່.
ຜົນກະທົບຂອງການສະ ໝັກ
- ໜ້າ ທີ່ສະກັດກັ້ນໄຟຟ້າແຮງດັນຂອງຄົນຂັບΩ m-n1 ສາມາດແກ້ໄຂບັນຫາຂອງ ໝາກ ຂຽບໄດ້ຢ່າງມີປະສິດຕິຜົນ.
- ນອກຈາກນັ້ນ, Ω m-n1 ຍັງຖືກປັບປຸງເພື່ອແກ້ໄຂບັນຫາຮູບແບບເຄື່ອງມື. ດ້ວຍການຊ່ວຍເຫຼືອຂອງຟັງຊັນຜູ້ສັງເກດການແຮງບິດ, ແຮງບິດໃນຂະບວນການເຄື່ອງຈັກແມ່ນຮັບປະກັນໃຫ້ຢູ່ໃນລະດັບ 1%.
- ໜ້າ ທີ່ຕໍ່ຕ້ານການປະທ້ວງແບບ spindle ທີ່ຖືກປັບແຕ່ງເປັນພິເສດແມ່ນຖືກພັດທະນາເພື່ອຕິດຕາມການປ່ຽນແຮງບິດຈາກແຕ່ລະໄລຍະ, ແລະຢຸດທັນທີໃນເວລາທີ່ເກີດການປະທະກັນ, ສະນັ້ນບັນຫາການປະທະກັນທີ່ເກີດຈາກການປະຕິບັດງານທີ່ບໍ່ຖືກຕ້ອງໃນຂະບວນການປຸງແຕ່ງພາກສະ ໜາມ ສາມາດແກ້ໄຂໄດ້.

ຄໍາຮ້ອງສະຫມັກຂອງ Hxdwh ac servo ມໍເຕີໃນເຄື່ອງແກະສະຫລັກທີ່ມີຄວາມແມ່ນຍໍາ 13925507910

ສະແກນລະຫັດ wechat QR ສຳ ລັບຂໍ້ມູນເພີ່ມເຕີມ 。13925507910
ເວລາໄປສະນີ: ສິງຫາ - 10-2020