Serîlêdana Hxdwh 23 bit nirxa mutleq ac servo motor LDD rêzeya lihevhatî Ω m-n1 ajokara servo servo di makîneya dirûvê rastîn de
Serlêdana makîneya gravura kontrolê ya hejmarî
Endezyariya CNC û makîneya frezek celebek amûra makîneya CNC ye. Makîneya gravurekî rastîn a metal dikare ji bo birrîn û sondajkirina ne-têkilî ya lewhe û lûleyên metal an ne-metal were bikar anîn. Ew bi taybetî ji bo birrîna lasera pola polayê zengarnegir, plakaya hesinî, çîpa sîlîsyûmê, çîpa seramîk, alloy titanium, epoxy, pola A3, elmas û materyalên din guncan e. Ew amûrek makînekirinê ya rastîn e ku ji hêla pergala CNC ve bi navberdana pir eksê ve ye. Pêdiviyên xwedan avantajên operasyona stabîl û pêbawer, kalîteya pêvajoyê ya baş, karîgeriya bilind, operasyona hêsan û ragirtina hêsan e. Bi navgîniya mîlîzekirin, sondajkirin, hûrkirin û awayên din, ew bi berfirehî di 3C, pêçikên rastîn, derman û warên din de tê bikar anîn. Bi zêdebûna pîşesaziya 5g re, bazara wê di pîşesaziya 3C de bi taybetî mezin e.
Hxdwh LDD servo motor & Ωm-N1 Servo drive Ωm-N1 Maça bêkêmasî
S kurtahî:
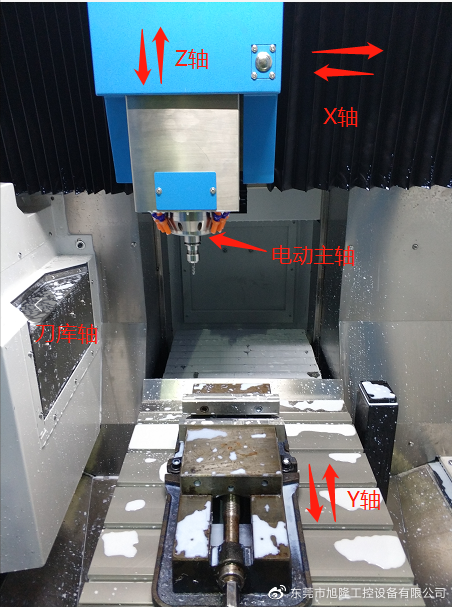
Têkiliya hevpar a makîneya gravurekî di hejmara çepê de, di nav de çepê û rastê X eksê, Y bervajî û pêşve diçin, Z ax ber bi jor û jor ve diçin, spindle zivirî û leza kovara amûrê (ax t) ) ji bo guhertina amûra otomatîkî. X, y, Z û t ax ji hêla servo ve têne kontrol kirin, û axên sereke ji hêla veguherînerê frekansê ve têne kontrol kirin. Parçeyên pêvajoyê li ser maseya xebatê, bi alîkariya bersiva bilez û aram a triaksial a XYZ, ji bo misogerkirina bandora pêvajoyê ya rastîniya wê, piraniya beşan (kilîtên têlefona desta, plaka bergê şûşe, çerxa metal) li ser têlefona desta beşdarî pêvajoyê ye.
Danasîna şemayê
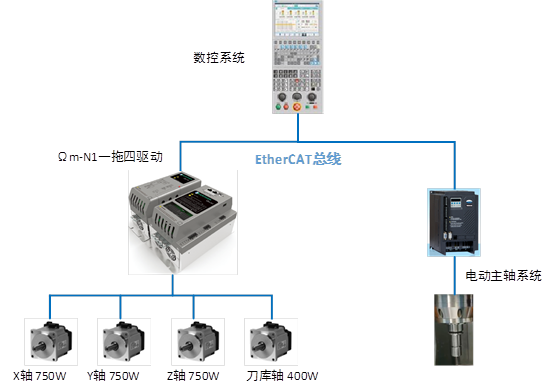
Bi karanîna Ωm-n1 rêzika servo ya pir xdwh LDD rêzeya 23 bit nirxa mutleq ac servo motor, pergalê danûstendina otobusê ya EtherCAT qebûl dike. Ew mîmariya hêza otobusê ya DC-yê dipejirîne û piştevaniya dabînkirina hêzê ya cascade ya gelek yekîneyên ajotinê dike. Ew dikare bi sê tebeqeyan an bi çar axan re were yek kirin. Ew dikare bi nermî were xwerû kirin ku hewcedariyên senaryoyên serlêdana cihêreng ên xerîdaran bicîh bîne.
Veavakirina elektrîkê
Veavakirina elektrîkê ya sepanê ya makîneya gravurekî servo motor Hxdwh 23 bit

23 bit nirxa teqez Hxdwh servo motor 400W 750W 13925507910

Ωm-N1 Ajokerê otobusê pir eksê 13925507910
Pergala CNC bi otobusa EtherCAT ve bi Ω m-n1 ve yek ajokar çar ajokar û pergala spindle ya elektrîkê ve girêdayî ye. Di bin çar ajokek çar ajotinê de, pergal X-axis 750W, Y-axis 750W, z-axis 750W û kovara kovar 400W kontrol dike.
Taybetmendiyên şemayê
- Avantaja formê
Ω m-n1 entegrasyona çar eksê, di vê sepanê de, ax-x-a çep-rast-dimeş, y-eks-paş-paş-paş, axe-Z-ya berjêr-xwer û beşa kovara amûrê ji bo guhertina amûra otomatîkî hemî ji hêla servo ve tê kontrol kirin, û qada ku gelek ajokar bikar tîne nuha tenê hewceyê yek ajokera otobusê ya pir eksê heye. Wekî din, çar ajokarek yek ajokar xwedî performansa hevdemî ya bilind e, di ragihandinê de dereng namîne, ku aborî û bi bandor e.
- Mezinahiya piçûk
Ω m-n1 bi mezinahiya xwe piçûk e, ku ji bo malpera serlêdanê bi malpera teng re cîh digire. Three sê rêbazên sazkirinê yên cuda hene, hêsan saz kirin û karanîna wan hêsan e.
- Performansa xurt
Bi performansa rast-ê ya otobûsa EtherCAT û bersivdan û aramiya Ω m û motora Huada LDD, rastbûna çêkirina tevahî pergalê garantî ye. Wekî din, Ω m-n1 ajokarê otobusê xeleka heyî ya hardware-ê dipejirîne, û bersiva loop-a-a-a-a-ya nuha garantiya bersivdayînê ye.
- Algorîtmaya Parzûna Adaptive
X, alavên Z û alavên alavê bi darê zorê têne ajotin. Destwerdana xalên rezonansê di pergalê de dê pir bandor li rastbûna makîneyê û nermbûna rûyê erdê bike. Algorîtmaya Ω m-n1 ajotina parzûna adapteyî dikare bixweber xalên rezonansê yên li ser pergalê nas bike, û xalên rezonansê bi bandorker veşêre, ji bo rastdariya çêkirina pergalê garantiya herî bijare peyda dike.
Zehmetiyên projeyê
Ji bo pîşesaziya makîneya gravurekê, şêweya çargoşeyê di pêvajoya metal de serêşiyek e. Sedema sereke ev e ku bersiva şaha navbirînê hergav di pêvajoya pêvajoyê de lihevnekirin hinekî li xala şûnda dimîne.
Bandora sepanê
- Fonksiyona zordarîkirina qurmê quadrantê ya ajokara Ω m-n1 dikare pirsgirêka pêlika quadrantê bi bandor çareser bike.
- Wekî din, Ω m-n1 jî çêtir e ku pirsgirêka şêweya amûrê çareser bike. Bi alîkariya fonksiyona çavdêriya tîrêjê, di pêvajoya maşîneyê de tîrêjiya tewrê tête garantîkirin ku di nav% 1 de be.
- Fonksiyona dij-pevçûnê ya spindle ya xwerû ya xwerû tête pêşve kirin ku ji dem bi dem çavdêriya guherîna tîrêjê bike, û di kêliya pevçûnê de yekser bisekine, da ku pirsgirêka pevçûnê ya ku ji ber xebata nerast di pêvajoya pêvajoya zeviyê de çêbûye were çareser kirin.

Serlêdana motora servo ya Hxdwh ac di makîneya dirûvê rastîn 13925507910

Code wechat QR Scan bike bo zaniyarîy zortir . 13925507910
Dema şandinê: Tebax-10-2020