Hxdwh 23-bittisen absoluuttisen arvon AC-servomoottorin käyttö LDD-sarja, joka vastaa Ω m-n1 -sarjan servo-ohjainta tarkkuusveistokoneessa
Numeerisen ohjauskaiverruskoneen käyttö
CNC-suunnittelu- ja jyrsinkone on eräänlainen CNC-työstökone. Metallin tarkkaa kaiverruskonetta voidaan käyttää metallien tai ei-metallisten levyjen ja putkien kosketuksettomaan leikkaamiseen ja poraamiseen. Se soveltuu erityisesti ruostumattoman teräslevyn, rautalevyn, piihakkeen, keraamisen sirun, titaaniseoksen, epoksin, A3-teräksen, timantin ja muiden materiaalien laserleikkaukseen. Se on tarkkuuskoneistuslaite, jossa on moniakselinen interpolointi CNC-järjestelmällä. Laitteiden etuna on vakaa ja luotettava toiminta, hyvä käsittelylaatu, korkea hyötysuhde, yksinkertainen käyttö ja kätevä huolto. Jyrsinnällä, porauksella, jauhamisella ja muilla tavoilla sitä käytetään laajalti 3C-, tarkkuushioma-aineissa, lääketieteellisillä ja muilla aloilla. 5g-teollisuuden lisääntyessä sen markkinat 3C-teollisuudessa ovat erityisen valtavat.
Hxdwh LDD-servomoottori & Ωm-N1 Servo-asema Ωm-N1 Täydellinen ottelu
S YHTEENVETO:
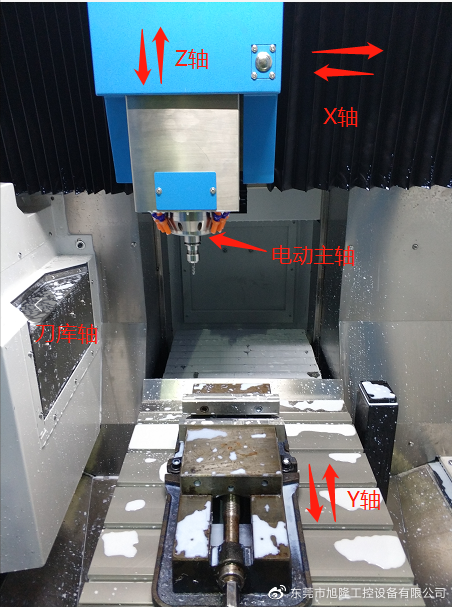
Kaiverruskoneen yhteinen koostumus on esitetty vasemmalla olevassa kuvassa, mukaan lukien vasen ja oikea liikkuva X-akseli, Y-akseli liikkuu edestakaisin, Z-akseli liikkuu ylös ja alas, nopea pyörivä kara ja työkaluakselin akseli (t-akseli) ) automaattista työkalunvaihtoa varten. X-, y-, Z- ja t-akseleita ohjataan servolla ja pääakseleita taajuusmuuttajalla. Käsittelyosat kiinnitetään työpöydälle kiinnittimen avulla XYZ-kolmiaksiaalisen nopean ja vakaan vasteen avulla, jotta varmistetaan sen erittäin tarkka käsittelyvaikutus, useimmat osat (matkapuhelimen avaimet, lasinen peitelevy, metallikehys) matkapuhelimella on sen osallistuminen käsittelyyn.
Järjestelmän esittely
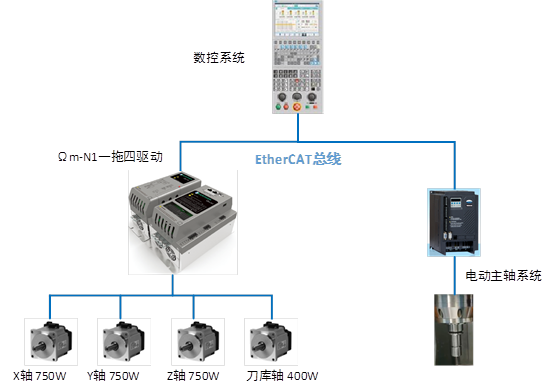
Käyttämällä Ωm-n1 -sarjan moniakselista servo- xdwh LDD -sarjan 23-bittistä AC-servomoottorin absoluuttista arvoa, järjestelmä hyväksyy EtherCAT-väyläyhteyden. Se hyväksyy DC-väylän tehoarkkitehtuurin ja tukee useiden käyttöyksikköjen kaskadi-virtalähdettä. Se voidaan integroida kolmeen tai neljään akseliin. Se voidaan joustavasti räätälöidä vastaamaan asiakkaiden erilaisten sovellusskenaarioiden vaatimuksia.
Sähkökonfiguraatio
Hxdwh 23-bittisen servomoottorin kaiverruskoneen sähköinen kokoonpano

23-bittinen absoluuttinen arvo Hxdwh-servomoottori 400W 750W 13925507910

Ωm-N1 Moniakselinen väyläohjain 13925507910
CNC-järjestelmä on kytketty Ω m-n1 -taajuusmuuttajaan ja sähköiseen karajärjestelmään EtherCAT-väylän kautta. Yhden taajuusmuuttajan alla 4-käyttöinen järjestelmä ohjaa X-akselia 750 W, Y-akselia 750 W, z-akselia 750 W ja lippa-akselia 400 W.
Järjestelmän ominaisuudet
- Lomakkeen etu
Ω m-n1 neliakselinen integrointi, tässä sovelluksessa vasen-oikea liikkuva x-akseli, taaksepäin y-akseli, ylös-alas liikkuva Z-akseli ja työkalun lippa-akseli automaattiseen työkalunvaihtoon ovat kaikki servo ohjaa, ja useita ohjaimia käyttävä kenttä tarvitsee nyt vain yhden moniakselisen väyläohjaimen. Lisäksi yhdellä taajuusmuuttajalla on korkea synkroninen suorituskyky, tiedonsiirrossa ei ole viivettä, mikä on taloudellista ja tehokasta.
- Pieni koko
Ω m-n1 on kooltaan pieni, mikä säästää tilaa kapealle levityskohteelle. Ja on olemassa kolme erilaista asennustapaa, helppo asentaa ja helppo käyttää.
- Vahva suorituskyky
EtherCAT-väylän reaaliaikaisen suorituskyvyn sekä Ω m: n ja Huada LDD -moottorin reagoivuuden ja vakauden ansiosta koko järjestelmän koneistustarkkuus taataan. Lisäksi Ω m-n1 -väylän ohjain hyväksyy laitteistovirran silmukan, ja erinomainen virtasilmukan vastaus on tae reagointikyvystä.
- Adaptiivinen suodatusalgoritmi
Laitteen X-, y- ja Z-akselit ohjataan ruuvitangolla. Resonanssipisteiden häiriöt järjestelmässä vaikuttavat suuresti työstötarkkuuteen ja pinnan tasaisuuteen. Adaptiivisen suodatuksen Ω m-n1 algoritmi voi automaattisesti tunnistaa järjestelmän resonanssipisteet ja vaimentaa resonanssipisteet tehokkaasti, mikä tarjoaa edullisimman takuun järjestelmän koneistustarkkuudelle.
Projektin vaikeudet
Kaiverruskoneteollisuudessa kvadranttikuvio on päänsärky metallin prosessoinnissa. Tärkein syy on, että interpolointiakselin vaste viivästyy aina hieman peruutuskohdassa sovitusprosessoinnin aikana.
Sovelluksen vaikutus
- Ω m-n1 -ohjaimen kvadrantin pullistuman estotoiminto voi tehokkaasti ratkaista kvadrantin aaltoilun ongelman.
- Lisäksi Ω m-n1 on myös optimoitu ratkaisemaan työkalukuvion ongelma. Vääntömomentin havainnointitoiminnon avulla vääntömomentin aaltoilu työstöprosessissa on taattu 1%: n sisällä.
- Erityinen räätälöity karan törmäyksenestotoiminto on kehitetty seuraamaan momentin muutosta ajoittain ja pysähtymään heti törmäyshetkellä, jotta kenttäprosessin virheellisen toiminnan aiheuttama törmäysongelma voidaan ratkaista.

Hxdwh-AC-servomoottorin käyttö tarkkuusveistokoneessa 13925507910

Skannaa wechat-QR-koodi saadaksesi lisätietoja 。13925507910
Viestin aika: 10-20-20