Hxdwh 23 ბიტიანი აბსოლუტური მნიშვნელობის ac servo motor LDD სერიის შესაბამისი Ω m-n1 სერიის servo მძღოლი ზუსტი კვეთის მანქანაში
რიცხვითი მართვის გრავიურა დანადგარის გამოყენება
CNC Engineering და milling machine არის ერთგვარი CNC ჩარხი. ლითონის ზუსტი გრავიურა მანქანა შეიძლება გამოყენებულ იქნას ლითონის ან არალითონური ფირფიტებისა და მილების უკონტაქტო ჭრისა და ბურღვისთვის. ეს განსაკუთრებით შესაფერისია უჟანგავი ფოლადის ფირფიტის, რკინის ფირფიტის, სილიციუმის ჩიპის, კერამიკული ჩიპის, ტიტანის შენადნობის, ეპოქსიდის, A3 ფოლადის, ალმასისა და სხვა მასალების ლაზერული ჭრისთვის. ეს არის ზუსტი დამამუშავებელი მოწყობილობა, მრავალ ღერძული ინტერპოლაციით CNC სისტემის მიერ. აღჭურვილობას აქვს სტაბილური და საიმედო მუშაობის უპირატესობა, დამუშავების კარგი ხარისხი, მაღალი ეფექტურობა, მარტივი ოპერაცია და მოსახერხებელი შენარჩუნება. ფრეზირების, ბურღვის, დაფქვისა და სხვა გზების საშუალებით, იგი ფართოდ გამოიყენება 3C, ზუსტი აბრაზივების, სამედიცინო და სხვა სფეროებში. 5 გ ინდუსტრიის ზრდასთან ერთად, მისი ბაზარი 3C ინდუსტრიაში განსაკუთრებით დიდია.
Hxdwh LDD servo motor & Ωm-N1 Servo drive Ωm-N1 შესანიშნავად ემთხვევა
S ummary:
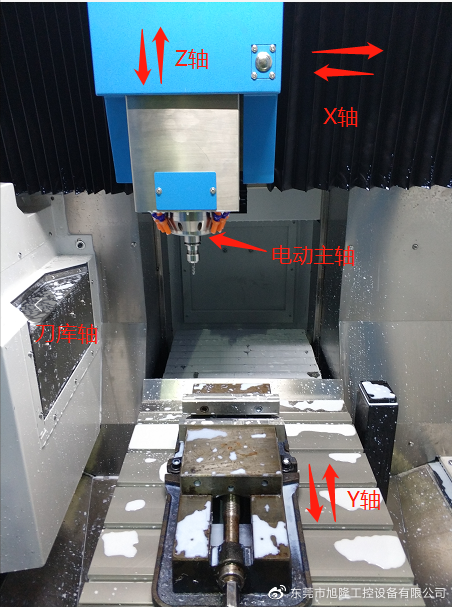
გრავიურა მანქანის საერთო შემადგენლობა ნაჩვენებია მარცხენა ფიგურაში, მათ შორის მარცხენა და მარჯვენა მოძრავი X ღერძი, Y ღერძი წინ და უკან, Z ღერძი ზემოთ და ქვემოთ, მაღალსიჩქარიანი მბრუნავი spindle და ინსტრუმენტის ჟურნალის ღერძი (t ღერძი ) ინსტრუმენტის ავტომატური შეცვლისთვის. X, y, Z და t ღერძი კონტროლდება სერვოთი, ხოლო მთავარ ღერძებს აკონტროლებს სიხშირის გადამყვანი. დამუშავების ნაწილები დაფიქსირებულია სამუშაო მაგიდაზე საშუალებით, XYZ triaxial– ის სწრაფი და სტაბილური რეაგირების დახმარებით, მისი მაღალი სიზუსტის დამუშავების ეფექტის უზრუნველსაყოფად, ნაწილების უმეტესობა (მობილური ტელეფონის გასაღებები, მინის საფარის ფირფიტა, მეტალის ჩარჩო) მობილურ ტელეფონს აქვს მონაწილეობა დამუშავებაში.
სქემის დანერგვა
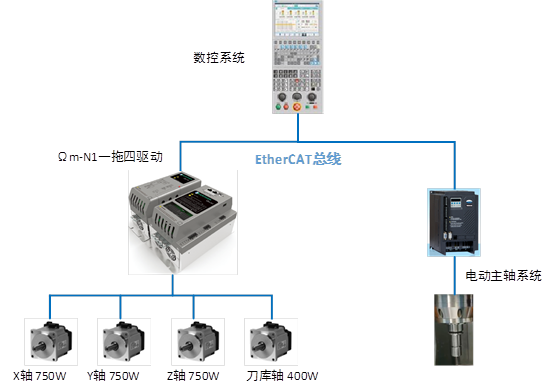
გამოიყენეთ Ωm-n1 სერია მრავალ ღერძიანი xdwh LDD სერიას 23 ბიტიან აბსოლუტურ მნიშვნელობას AC servo ძრავით, სისტემა იღებს EtherCAT ავტობუსის კომუნიკაციას. იგი იღებს DC ავტობუსის დენის არქიტექტურას და მხარს უჭერს კასკადის ელექტრომომარაგებას მრავალი წამყვანი ერთეულით. ის შეიძლება ინტეგრირდეს სამ ღერძთან ან ოთხ ღერძთან. მისი მოქნილად მორგება შესაძლებელია მომხმარებელთა სხვადასხვა აპლიკაციის სცენარის მოთხოვნების დასაკმაყოფილებლად.
ელექტრული კონფიგურაცია
Hxdwh 23 ბიტიანი სერვოძრავის გრავიურა დანადგარის ელექტრული კონფიგურაციის გამოყენება

23 ბიტიანი აბსოლუტური მნიშვნელობა Hxdwh servo motor 400W 750W 13925507910

Ωm-N1 მრავალ ღერძიანი ავტობუსის მძღოლი 13925507910
CNC სისტემა უკავშირდება Ω m-n1 ერთ წამყვან ოთხძრავიან და ელექტრო spindle სისტემას EtherCAT ავტობუსის მეშვეობით. ერთი წამყვანი ოთხი დრაივის ქვეშ, სისტემა აკონტროლებს X- ღერძი 750W, Y- ღერძი 750W, z- ღერძი 750W და ჟურნალის ღერძი 400W.
სქემის მახასიათებლები
- ფორმის უპირატესობა
Ω m-n1 ოთხი ღერძის ინტეგრაცია, ამ პროგრამაში, მარცხენა მარცხნივ მოძრავი x ღერძი, უკანა უკანა მხარეს y ღერძი, ზემოთ გადაადგილებული Z ღერძი და ინსტრუმენტის ჟურნალის ღერძი ინსტრუმენტის ავტომატური შეცვლისთვის აკონტროლებს სერვო და მრავალი დრაივერის გამოყენებით ველს ახლა მხოლოდ ერთი მრავალხაზიანი ავტობუსის მძღოლი სჭირდება. უფრო მეტიც, ერთი წამყვანი ოთხი წამყვანი აქვს მაღალი სინქრონული შესრულება, კომუნიკაციის შეფერხება არ არის, რაც ეკონომიური და ეფექტურია.
- Მცირე ზომის
Ω m-n1 არის მცირე ზომის, რაც ზოგავს ადგილს განაცხადის საიტისთვის ვიწრო ადგილით. დაინსტალირების სამი განსხვავებული მეთოდი არსებობს, მარტივი ინსტალაცია და გამოსაყენებელი.
- ძლიერი შესრულება
EtherCAT ავტობუსის რეალურ დროში შესრულებით და Ω m და Huada LDD ძრავის რეაგირებისა და სტაბილურობით, გარანტირებულია მთელი სისტემის დამუშავების სიზუსტე. გარდა ამისა, Ω m-n1 ავტობუსის მძღოლი იღებს ტექნიკის მიმდინარე ციკლს, ხოლო შესანიშნავი მიმდინარე ციკლის რეაგირება არის რეაგირების გარანტია.
- ადაპტაციური ფილტრაციის ალგორითმი
აღჭურვილობის X, y და Z ღერძებს მართავს ხრახნიანი ჯოხი. რეზონანსული წერტილების ჩარევა სისტემაში მნიშვნელოვნად იმოქმედებს დამუშავების სიზუსტეზე და ზედაპირის სიგლუვეზე. Ω m-n1 მამოძრავებელი ადაპტური ფილტრაციის ალგორითმს შეუძლია ავტომატურად განსაზღვროს სისტემის რეზონანსული წერტილები და ეფექტურად აღკვეთოს რეზონანსული წერტილები, რაც უზრუნველყოფს სისტემის დამუშავების სიზუსტის ყველაზე ხელსაყრელ გარანტიას.
პროექტის სირთულეები
გრავიურა მანქანების ინდუსტრიისთვის, კვადრატის ნიმუში თავის ტკივილია ლითონის დამუშავების პროცესში. მთავარი მიზეზი არის ის, რომ ინტერპოლაციის ლილვის რეაქცია ყოველთვის ოდნავ ჩამორჩება უკუქცევის წერტილს შესატყვისი დამუშავების დროს.
გამოყენების ეფექტი
- Ω m-n1 დრაივერის კვადრატის დატვირთვის აღკვეთის ფუნქციას შეუძლია ეფექტურად გადაჭრას კვადრატის ტალღის პრობლემა.
- გარდა ამისა, Ω m-n1 ასევე ოპტიმიზირებულია ინსტრუმენტის ნიმუშის პრობლემის გადასაჭრელად. ბრუნვის დამკვირვებლის ფუნქციის დახმარებით, ბრუნვის ტალღა დამუშავების პროცესში გარანტირებულია 1% -ის ფარგლებში.
- შემუშავებულია სპეციალური მორგებული spindle საწინააღმდეგო შეჯახების ფუნქცია, რომელიც დროდადრო აკონტროლებს ბრუნვის ცვლილებას და დაუყოვნებლივ შეჩერდება შეჯახების მომენტში, რათა გადაჭრას საველე დამუშავების პროცესში არასათანადო მუშაობით გამოწვეული შეჯახების პრობლემა.

Hxdwh ac servo motor- ის გამოყენება ზუსტი კვეთის მანქანაში 13925507910

დაასკანირეთ wechat QR კოდი დამატებითი ინფორმაციისთვის 。13925507910
საფოსტო დრო: აგვისტო-10-2020