Xշգրիտ փորագրման մեքենայում Hxdwh 23 bit բացարձակ արժեք ac ac servo motor LDD սերիայի համապատասխանող Ω m-n1 սերիայի servo driver
Թվային կառավարման փորագրիչ մեքենայի կիրառում
CNC Engineering և ֆրեզերային մեքենան մի տեսակ CNC մեքենայական գործիք է: Մետաղի ճշգրիտ փորագրման մեքենան կարող է օգտագործվել մետաղական կամ ոչ մետաղական թիթեղների և խողովակների ոչ կոնտակտային կտրման և հորատման համար: Այն հատկապես հարմար է չժանգոտվող պողպատից ափսեի, երկաթե ափսեի, սիլիկոնային չիպի, կերամիկական չիպի, տիտանի խառնուրդի, էպօքսիդի, A3 պողպատի, ադամանդի և այլ նյութերի լազերային կտրման համար: Դա ճշգրիտ հաստոցներ է `CNC համակարգով բազմաառանցքային միջանցքով: Սարքավորումը ունի կայուն և հուսալի շահագործման, լավ մշակման որակի, բարձր արդյունավետության, պարզ աշխատանքի և հարմարավետության առավելություններ: Ֆրեզավորման, հորատման, հղկման և այլ ձևերի միջոցով այն լայնորեն օգտագործվում է 3C, ճշգրիտ հղկող, բժշկական և այլ ոլորտներում: 5 գ արդյունաբերության աճի հետ մեկտեղ, նրա շուկան 3C արդյունաբերությունում հատկապես հսկայական է:
Hxdwh LDD servo motor & Ωm-N1 Servo drive Ωm-N1 Կատարյալ համընկնում
S ummary:
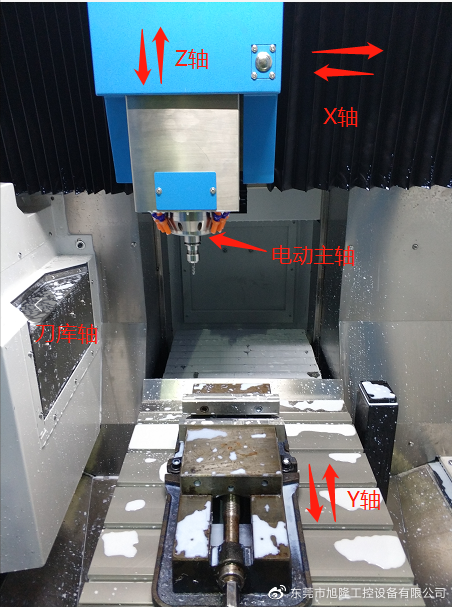
Փորագրիչ մեքենայի ընդհանուր կազմը ցույց է տրված ձախ գծապատկերում, ներառյալ ձախ և աջ շարժվող X առանցքը, Y առանցքը հետ ու առաջ շարժվող, Z առանցքը շարժվող վեր ու վար, գերարագ պտտվող պտտաձողը և գործիքների պահոցի առանցքը (t առանցք ) գործիքի ավտոմատ փոփոխության համար: X, y, Z և t առանցքները վերահսկվում են servo- ի կողմից, իսկ հիմնական առանցքները վերահսկվում են հաճախականության փոխարկիչի միջոցով: Մշակման մասերը ամրացվում են աշխատանքային սեղանի վրա ՝ XYZ եռահեռ արագ և կայուն արձագանքի միջոցով, ապահովելու համար դրա բարձր ճշգրտության մշակման ազդեցությունը, մասերի մեծ մասը (բջջային հեռախոսի ստեղներ, ապակե ծածկույթի ափսե, մետաղական շրջանակ) բջջային հեռախոսն իր մասնակցությունն ունի մշակման գործընթացում:
Սխեման ներդրում
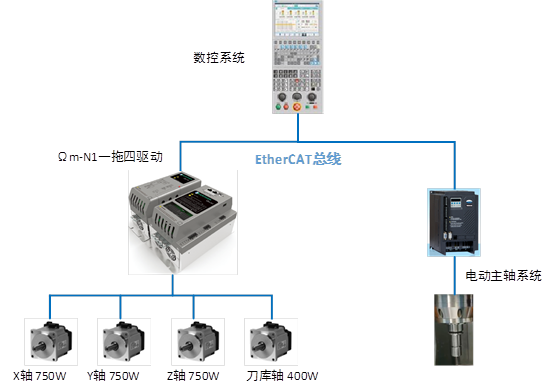
Օգտագործելով Բազմ m-n1 սերիայի xdwh LDD սերիայի 23 բիթ բացարձակ արժեքին AC servo շարժիչով, համակարգը ընդունում է EtherCAT ավտոբուսի հաղորդակցումը: Այն ընդունում է DC ավտոբուսի էներգիայի ճարտարապետությունը և աջակցում է բազմաթիվ շարժիչային միավորների կասկադի էլեկտրամատակարարմանը: Այն կարող է ինտեգրվել երեք առանցքների կամ չորս առանցքների: Այն կարող է ճկունորեն հարմարեցվել ՝ հաճախորդների կիրառման տարբեր սցենարների պահանջները բավարարելու համար:
Էլեկտրական կազմաձեւում
Hxdwh 23 բիթանոց servo շարժիչի փորագրիչ մեքենայի էլեկտրական կազմաձևում

23 բիթ բացարձակ արժեք Hxdwh servo շարժիչ 400W 750W 13925507910

Ωm-N1 բազմաառանցքային ավտոբուսի վարորդ 13925507910
CNC համակարգը EtherCAT ավտոբուսի միջոցով միացված է Ω m-n1 մեկ շարժիչով չորս շարժիչով և էլեկտրական spindle համակարգով: Մեկ շարժիչով չորս շարժիչի տակ համակարգը վերահսկում է X առանցք 750W, Y առանցք 750W, z առանցք 750W և ամսագրի առանցք 400W:
Սխեման առանձնահատկությունները
- Ձևի առավելություն
Ω m-n1 չորս առանցքների ինտեգրում, այս ծրագրում ձախից աջ շարժվող x առանցքը, ետ դեպի ետ y առանցքը, վերև վար շարժվող Z առանցքը և գործիքի ամսագրի առանցքը գործիքների ավտոմատ փոփոխության համար բոլորը վերահսկվում է servo- ի կողմից, և մի քանի վարորդներ օգտագործող դաշտին այժմ անհրաժեշտ է միայն մեկ ավտոբուսային ավտոբուսի մեկ շարժիչ: Ավելին, մեկ շարժիչով չորս սկավառակն ունի բարձր սինքրոն կատարում, առանց հաղորդակցության հետաձգման, ինչը տնտեսական և արդյունավետ է:
- Փոքր չափս
Ω m-n1- ը փոքր չափի է, ինչը տարածություն է խնայում նեղ տարածքով կիրառման կայքի համար: Եվ տեղադրման երեք տարբեր եղանակ կա `դյուրին տեղադրման և օգտագործման համար դյուրին:
- Ուժեղ կատարում
EtherCAT ավտոբուսի իրական ժամանակում կատարմամբ և Ω m- ի և Huada LDD շարժիչի արձագանքման և կայունության շնորհիվ երաշխավորված է ամբողջ համակարգի մշակման ճշգրտությունը: Բացի այդ, Ω m-n1 ավտոբուսի վարորդը ընդունում է ապարատային հոսանքի օղակը, և գերազանց ընթացիկ օղակի արձագանքը պատասխանունակության երաշխիքն է:
- Հարմարվող զտման ալգորիթմ
Սարքավորման X, y և Z առանցքները վարվում են պտուտակային ձողով: Ռեզոնանսային կետերի միջամտությունը համակարգում մեծապես կազդի մեքենայացման ճշգրտության և մակերեսի հարթության վրա: Ω m-n1 շարժիչ ադապտիվ զտման ալգորիթմը կարող է ավտոմատ կերպով որոշել համակարգի ռեզոնանսային կետերը և արդյունավետորեն ճնշել ռեզոնանսային կետերը ՝ ապահովելով համակարգի մշակման ճշգրտության առավել բարենպաստ երաշխիք:
Projectրագրի դժվարությունները
Փորագրող մեքենայի արդյունաբերության համար քառակուսի օրինաչափությունը գլխացավանք է մետաղի վերամշակման մեջ: Հիմնական պատճառն այն է, որ համընկնումի մշակման ընթացքում ինտերպոլացիայի լիսեռի արձագանքը միշտ մի փոքր հետ է մնում հետադարձ կետում:
Դիմումի էֆեկտ
- Ω m-n1 շարժիչի քառակուսի ուռուցքի ճնշման գործառույթը կարող է արդյունավետորեն լուծել քառակուսի ծածանքի խնդիրը:
- Բացի այդ, Ω m-n1- ը օպտիմիզացված է նաև գործիքակազմի խնդիրը լուծելու համար: Մոմենտը դիտելու ֆունկցիայի օգնությամբ, մեքենայացման գործընթացում ոլորող մոմենտ ստեղծելը երաշխավորված է 1% -ի սահմաններում:
- Հատուկ հարմարեցված spindle հակաբախման գործառույթը մշակվում է ժամանակ առ ժամանակ մոմենտի փոփոխությունը վերահսկելու և բախման պահին անմիջապես կանգ առնելու համար, որպեսզի դաշտային մշակման գործընթացում ոչ պատշաճ շահագործման արդյունքում առաջացած բախման խնդիրը:

Hxdwh ac servo շարժիչի կիրառումը ճշգրիտ փորագրող մեքենայում 13925507910

Սկանավորեք wechat QR կոդ ՝ լրացուցիչ տեղեկությունների համար 。13925507910
Հաղորդման ժամանակը ՝ օգոստոս-10-2020