Hxdwh 23 biteko balio absolutua AC servo motorra aplikatzea LDD seriea Ω m-n1 serie servo kontrolatzailea zehaztasun taila-makinan
Zenbakizko kontrolak grabatzeko makina aplikatzea
CNC Ingeniaritza eta fresatzeko makina CNC makina erreminta mota da. Metala zehaztasunez grabatzeko makina kontaktu gabeko ebaketa eta metalezko edo ez-metalezko plakak eta tutuak zulatzeko erabil daiteke. Bereziki egokia da altzairu herdoilgaitzezko xafla, burdinazko xafla, silizio txipa, zeramikazko txipa, titaniozko aleazioa, epoxi, A3 altzairua, diamantea eta bestelako materialak laserrez ebakitzeko. Zehaztasunez mekanizatutako ekipoak dira, CNC sistemaren bidez ardatz anitzeko interpolazioa dutenak. Ekipamenduak funtzionamendu egonkor eta fidagarria, prozesatzeko kalitate ona, eraginkortasun handia, funtzionamendu erraza eta mantentze erosoa ditu. Fresatzeko, zulatzeko, ehotzeko eta beste modu batzuen bidez, oso erabilia da 3C, doitasun urratzaileetan, medikuntzan eta beste arlo batzuetan. 5g industriaren hazkundearekin batera, bere merkatua 3C industrian oso handia da.
Hxdwh LDD servo motorra eta Ωm-N1 Servo drive Ωm-N1 Partida ezin hobea
S ummary:
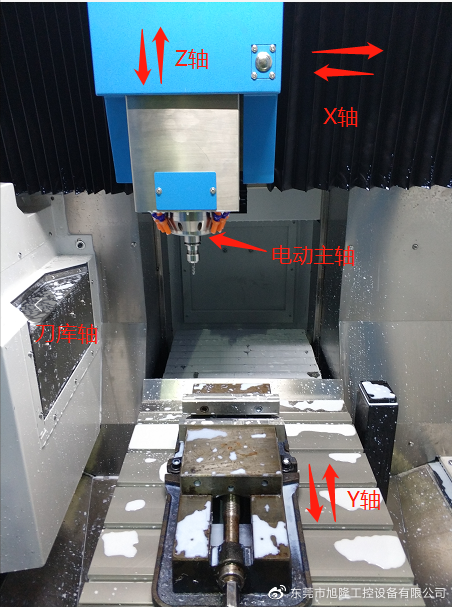
Grabatzeko makinaren konposizio arrunta ezkerreko irudian ageri da, ezkerreko eta eskuineko X ardatza mugitzen, Y ardatza atzera eta aurrera mugitzen, Z ardatza gora eta behera mugitzen, abiadura handiko birakaria eta erreminta aldizkariaren ardatza (t ardatza) ) tresna automatikoki aldatzeko. X, y, Z eta t ardatzak servoaren bidez kontrolatzen dira, eta ardatz nagusiak maiztasun bihurgailuaren bidez. Prozesatzeko piezak lanabesaren gainean finkatzen dira lanabesaren bidez, XYZ triaxialaren erantzun azkar eta egonkorraren laguntzarekin, zehaztasun handiko prozesatze efektua ziurtatzeko, pieza gehienak (telefono mugikorreko giltzak, beirazko estalkia, metalezko egitura) telefono mugikorrak prozesuan parte hartzen du.
Eskemaren sarrera
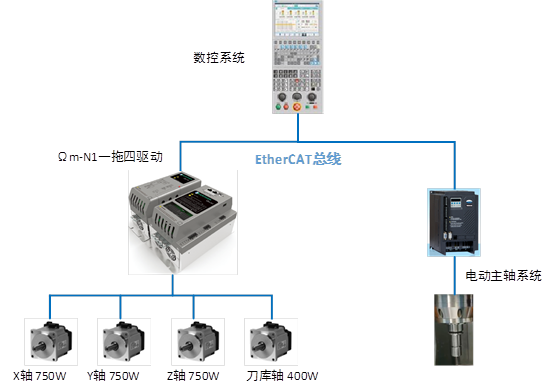
Erabiltzea Ωm-n1 sail anitzeko ardatz SERVANDO unitatean bat datorren H xdwh LDD series 23 bit absolutua balio ac SERVANDO motor, sistema EtherCAT bus komunikazio hartzen. DC busaren arkitektura hartzen du eta unitate anitzeko kaskarako energia hornidura onartzen du. Hiru ardatzekin edo lau ardatzekin integratu daiteke. Malgutasunez pertsonaliza daiteke bezeroen aplikazio eszenatoki desberdinen eskakizunak asetzeko.
Konfigurazio elektrikoa
Aplikazioko konfigurazio elektrikoa Hxdwh 23 biteko servo motorra grabatzeko makinaren

23 biteko balio absolutua Hxdwh servo motorra 400W 750W 13925507910

Ωm-N1 ardatz anitzeko autobus gidaria 13925507910
CNC sistema EtherCAT busaren bidez konektatzen da Ω m-n1 drive one drive lau eta ardatz elektrikoaren sistemarekin. Unitate lau baten azpian, sistemak X ardatza 750W, Y ardatza 750W, z ardatza 750W eta aldizkariko ardatza 400W kontrolatzen ditu.
Eskemaren ezaugarriak
- Forma abantaila
Ω m-n1 lau ardatzaren integrazioa, aplikazio honetan, ezker-eskuin mugitzen den x ardatza, bizkar-atzera y ardatza, gora-behera mugitzen den Z ardatza eta erreminta aldizkariaren ardatza tresna automatikoki aldatzeko dira. Servo bidez kontrolatuta dago, eta orain kontrolatzaile anitz erabiliz eremuak ardatz anitzeko autobus kontrolatzaile bakarra behar du. Gainera, lau disko batek errendimendu sinkroniko handia du, ez du komunikaziorako atzerapenik, hau da, ekonomikoa eta eraginkorra.
- Tamaina txikia
Ω m-n1 tamaina txikikoa da eta horrek gune estua duen aplikazioarentzako lekua aurrezten du. Eta hiru instalazio metodo daude, instalatzeko erraza eta erabiltzeko erraza.
- Errendimendu indartsua
EtherCAT busaren denbora errealean errendimendua eta Ω m-ren eta Huada LDD motorren erantzunkortasuna eta egonkortasuna bermatuta dago sistema osoaren mekanizazio-zehaztasuna. Gainera, Ω m-n1 autobus kontrolatzaileak hardware korronte begizta hartzen du eta korronte begizta erantzun bikaina da erantzuteko bermea.
- Iragazki egokitzeko algoritmoa
Ekipoaren X, y eta Z ardatzak torloju-hagaxkaren bidez gidatzen dira. Erresonantzia puntuen interferentziak sisteman eragin handia izango du mekanizazioaren zehaztasunean eta gainazalaren leuntasunean. Ω m-n1 iragazki egokitzailea gidatzen duen algoritmoak sistemako erresonantzia puntuak automatikoki identifika ditzake eta erresonantzia puntuak modu eraginkorrean ezabatu ditzake, sistemaren mekanizazio zehaztasunerako bermerik egokiena eskainiz.
Proiektuaren zailtasunak
Grabatua egiteko makinen industrian, koadrantearen eredua buruko mina da metalen prozesamenduan. Arrazoi nagusia zera da: interpolazio ardatzaren erantzuna alderantzizko puntuan beti zertxobait atzeratzen dela bat etortzeko prozesuan.
Aplikazio efektua
- Ω m-n1 kontrolatzailearen kuadranteak puzteko funtzioak koadrantearen uhinaren arazoa konpon dezake modu eraginkorrean.
- Horrez gain, Ω m-n1 ere optimizatuta dago tresna ereduaren arazoa konpontzeko. Momentua behatzeko funtzioaren laguntzarekin, mekanizazio-prozesuko momentu-etenaldia% 1eko bermea dela ziurtatzen da.
- Talka anti-pertsonalizatutako ardatzaren funtzio berezia noizean behin momentuaren aldaketa kontrolatzeko eta talka egiteko momentuan berehala geldiarazteko garatzen da, eremua prozesatzeko prozesuan okerreko funtzionamenduak eragindako talkaren arazoa konpondu ahal izateko.

Hxdwh ca servo motorra aplikatzea doitasunezko taila-makinan 13925507910

Eskaneatu wechat QR kodea informazio gehiagorako 。13925507910
Mezuaren ordua: 2020-Aug-10