Hxdwh 23-bitise absoluutväärtuse vahelduvvoolumootori LDD seeria sobitamine täppis-nikerdamismasinas Ω m-n1-seeria servojuhiga
Arvjuhtimisega graveerimismasina kasutamine
CNC-inseneri- ja freespink on omamoodi CNC-tööpink. Metallist täppisgraveerimismasinat saab kasutada metalli või mittemetallist plaatide ja torude kontaktivabaks lõikamiseks ja puurimiseks. See sobib eriti roostevabast terasest plaadi, rauaplaadi, ränikiibi, keraamilise kiibi, titaanisulami, epoksü-, A3-terase, teemandi ja muude materjalide laserlõikamiseks. See on CNC-süsteemi abil mitme telje interpoleerimisega täppistöötlusseade. Varustuse eelised on stabiilne ja usaldusväärne töö, hea töötlemiskvaliteet, kõrge efektiivsus, lihtne töö ja mugav hooldus. Läbi freesimise, puurimise, lihvimise ja muudel viisidel kasutatakse seda laialdaselt 3C, täppislihvimis-, meditsiini- ja muudes valdkondades. 5g tööstuse kasvuga on selle turg 3C tööstuses eriti suur.
Hxdwh LDD servomootor ja Ωm-N1 servoajam Ωm-N1 Täiuslik vaste
S KOKKUVÕTE:
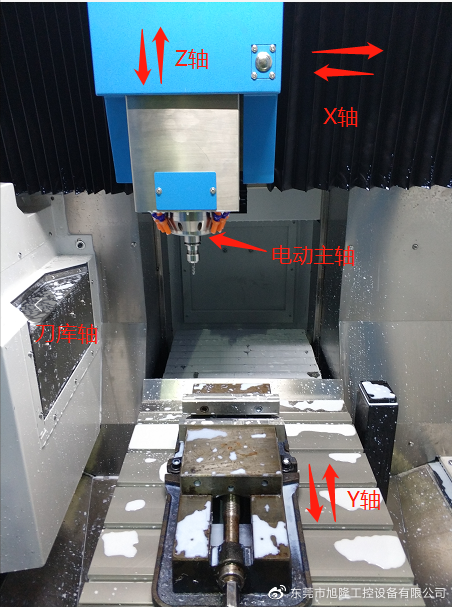
Graveerimismasina üldine koostis on näidatud vasakul oleval joonisel, sealhulgas vasak ja parem liikuv X-telg, Y-telg edasi-tagasi liikumine, Z-telje liikumine üles ja alla, kiire pöörleva spindli ja tööriista ajakirja telg (t-telg) ) tööriista automaatseks vahetamiseks. X-, y-, Z- ja t-telgi juhib servo ning põhitelgi sagedusmuundur. Töötlemisosad on fikseeritud töölauale XYZ triaxial kiire ja stabiilse reageerimise abil, et tagada selle ülitäpne töötlemise efekt, enamus osi (mobiiltelefoni klahvid, klaasist katteplaat, metallraam) töötlemisel osalemine.
Skeemi tutvustus
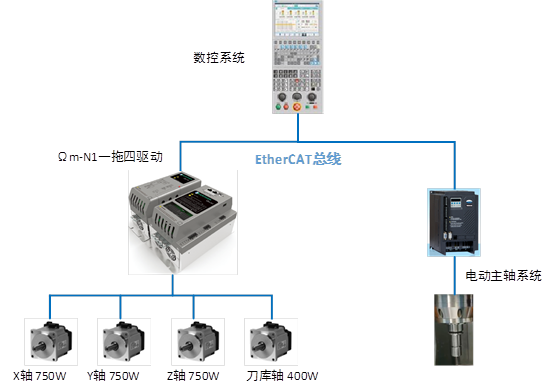
Kasutades Ωm-n1 seeria mitmeteljelist servoseadet, mis sobib H xdwh LDD seeria 23-bitise absoluutväärtusega servomootoriga, võtab süsteem kasutusele EtherCAT-siini. See võtab kasutusele alalisvoolu toiteallika arhitektuuri ja toetab mitme ajami ühikut. Seda saab integreerida kolme või nelja teljega. Seda saab paindlikult kohandada, et see vastaks klientide erinevate rakendusstsenaariumide nõuetele.
Elektriline konfiguratsioon
Hxdwh 23-bitise servomootori graveerimismasina rakenduse elektriline konfiguratsioon

23-bitine absoluutväärtus Hxdwh servomootor 400W 750W 13925507910

Ωm-N1 mitme telje bussijuht 13925507910
CNC-süsteem on EtherCAT-siini kaudu ühendatud Ω m-n1 ühe ajamiga nelikvedu ja elektrilise spindli süsteemiga. Ühe ajami nelja ajami all juhib süsteem X-telge 750W, Y-telge 750W, z-telge 750W ja salve telge 400W.
Kava tunnused
- Vormi eelis
Ω m-n1 neljateljeline integreerimine, selles rakenduses on vasak-parem liikuv x-telg, selja-tagasi y-telg, üles-alla liikuv Z-telg ja tööriista ajakirja telg tööriista automaatseks vahetamiseks servo juhib ja mitut draiverit kasutav väli vajab nüüd ainult ühte mitmeteljelist bussijuhti. Veelgi enam, ühel ajamil on neli sünkroonset jõudlust, side pole viivitatud, mis on ökonoomne ja tõhus.
- Väike suurus
Ω m-n1 on väikese suurusega, mis säästab kitsa saidiga rakenduskoha jaoks ruumi. Ja seal on kolm erinevat paigaldusmeetodit, lihtne paigaldada ja kasutada.
- Tugev jõudlus
EtherCAT-siini reaalajas toimimise ning Ω m ja Huada LDD mootori reageerimisvõime ja stabiilsuse korral on tagatud kogu süsteemi mehaaniline täpsus. Lisaks võtab Ω m-n1 siini juht vastu riistvaralise vooluahela ja suurepärane vooluahela reaktsioon on reageerimisvõime tagatis.
- Adaptiivne filtreerimisalgoritm
Seadmete X-, y- ja Z-telge juhitakse kruvivarda abil. Resonantspunktide sekkumine süsteemi mõjutab oluliselt töötlemise täpsust ja pinna siledust. Adaptiivse filtreerimise juhtimisega Ω m-n1 algoritm suudab automaatselt tuvastada süsteemi resonantspunktid ja tõhusalt summutada resonantspunktid, pakkudes süsteemi töötlemistäpsusele kõige soodsamat garantiid.
Projekti raskused
Graveerimismasinatööstuse jaoks on kvadrandmuster metalli töötlemisel peavalu. Peamine põhjus on see, et sobitamise töötlemise ajal jääb interpoleerimisvõlli reageerimispunktis vastavus alati pisut maha.
Rakendusefekt
- Ω m-n1 draiveri kvadrandipuhumise vähendamise funktsioon suudab kvadrandi pulsatsiooni probleemi tõhusalt lahendada.
- Lisaks on Ω m-n1 optimeeritud ka tööriista mustri probleemi lahendamiseks. Pöördemomendi vaatleja funktsiooni abil on pöördemomendi lainetus töötlemisprotsessis garanteeritud 1% piires.
- Spetsiaalne spetsiaalne spindli kokkupõrkevastane funktsioon on välja töötatud, et jälgida pöördemomendi muutumist aeg-ajalt ja peatuda kohe kokkupõrke hetkel, et lahendada kokkupõrke probleem, mis on põhjustatud valest töötamisest välitöötlusprotsessis.

Hxdwh ac servomootori rakendamine täppis-nikerdamismasinas 13925507910

Skannige lisateabe saamiseks QR-koodi QR-koodi 。13925507910
Postituse aeg: august 10-2020