-

Harmonic reducerLSS series LSD
Harmonic reducerLSS series LSD Model:LSD 14/ 17/20/25/32 Deceleration:50~100 ratio Rated tonque at 2000/min input :3.7~96Nm Pemissble peak ooe at t and stop:12~ 233Nm Perminsble maximum valefor averagr loadtorgue:4.7~151Nm -

YB280 series AC three-phase four-wire single-section general purpose power supply filter
Rated voltage: 380/440VAC Rated current: 10 ~ 200A Advantages: three-phase four-wire power filter, low leakage current, general purpose, small size, easy to install. Application equipment: Widely used in switching power supplies, UPS, commercial terminals, electronic monitoring and other power elect -

YB966 inverter output sine wave filter
Rated voltage: 380/690/1140VAC 50/60HZ Rated current: 3A~5000A Advantages: Excellent conduction filtering effect, used to suppress the electromagnetic interference generated by the inverter, reduce the coupling interference of the output end of the inverter to -

YB610 Series AC double section enhanced power filter
Rated voltage: 250VAC Rated current: 1 ~ 50A Product advantages: two-section filter, strong differential mode filter effect, differential mode filter inductance, low frequency performance. Application equipment: Suitable for switching power supply, inverter, servo, power converter and other single-p -

YB422-YB430 series AC single-phase two-stage universal filter
Rated voltage: 250VAC YB420 rated voltage: 3-30A optional YB430 rated voltage: 3-30A optional Product advantages: High performance filter, dual section filter, good mid to high frequency performance. -

YB410 series AC single-phase two-stage universal filter
YB410 series AC single-phase two-stage general purpose filter Rated voltage: 250VAC Rated current: 1 ~ 200A Advantages: two-section filter, good common-mode filter effect, low leakage current, -

YB210 series AC single-phase power filter
YB210 series AC single-phase single stage universal filter Rated voltage: 250VAC Rated current: 1~300A optional -
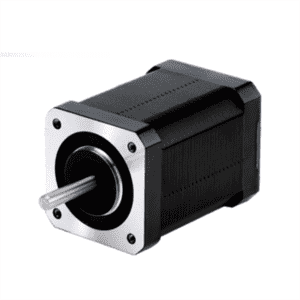
G-3-1 42 series two-phase stepping motor
42 series two-phase stepping motor General specifications Step accuracy : ±5%(Whole step、Empty load) Temperature rise:80°C Max Ambient temperature:-10℃-+50℃ Insulation resistance:100MΩmin.500VDC Pressure resistance:500VAC for one minute Radial runout:0.06Max.(450g-load) Axial runout:0.08Max.(450g-load) Stepper motor model Phase Step angle (°) Holding torque (NM) Rated current (A) Phase inductance (mH) Phase resistance (Ohm) Number Rotor inertia (g.cm²) Shaft... -
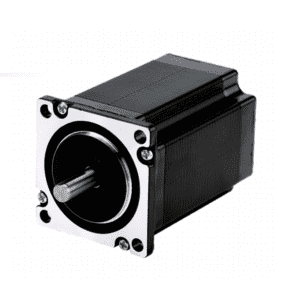
G-3-2 57 series two-phase stepping motor
57 series two-phase stepping motor General specifications Step accuracy : ±5%(Whole step、Empty load) Temperature rise:80°C Max Ambient temperature:-10℃-+50℃ Insulation resistance:100MΩmin.500VDC Pressure resistance:500VAC for one minute Radial runout:0.06Max.(450g-load) Axial runout:0.08Max.(450g-load) Stepper motor model Phase Step angle (°) Holding torque (NM) Rated current (A) Phase inductance (mH) Phase resistance (Ohm) Number Rotor inertia (g.cm²) Shaft... -
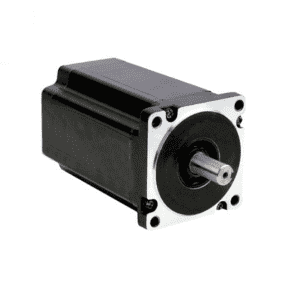
G-3-3 86 series two-phase stepping motor
86 series two-phase stepping motor General specifications Step accuracy : ±5%(Whole step、Empty load) Temperature rise:80°C Max Ambient temperature:-10℃-+50℃ Insulation resistance:100MΩmin.500VDC Pressure resistance:500VAC for one minute Radial runout:0.06Max.(450g-load) Axial runout:0.08Max.(450g-load) Stepper motor model Phase Step angle (°) Holding torque (NM) Rated current (A) Phase inductance (mH) Phase resistance (Ohm) Number Rotor inertia (g.cm²) Shaft... -
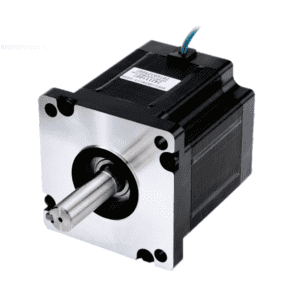
G-3-4 110-130 series two-phase stepping motor
110/130 series two-phase stepping motor General specifications Step accuracy : ±5%(Whole step、Empty load) Temperature rise:80°C Max Ambient temperature:-10℃-+50℃ Insulation resistance:100MΩmin.500VDC Pressure resistance:500VAC for one minute Radial runout:0.06Max.(450g-load) Axial runout:0.08Max.(450g-load) Stepper motor model Phase Step angle (°) Holding torque (NM) Rated current (A) Phase inductance (mH) Phase resistance (Ohm) Number Rotor inertia (g.cm²) ... -
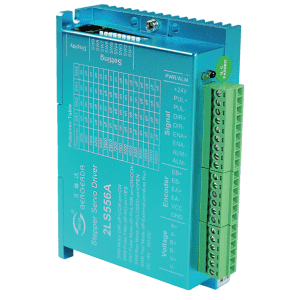
G-2-1 Closed loop stepping driver 2LS556A
Based on the platform of 32-bit ARM processing chip, the magnetic field orientation and high-speed flux-weakening algorithm in the servo driver are designed to achieve excellent performance. The built-in vector control design and servo demodulation function of the driver, combined with the feedback of the closed-loop motor encoder, make the stepping servo system have the features of low noise, low heating, no lost steps and higher application speed , and can improve the intelligent equipment ...











