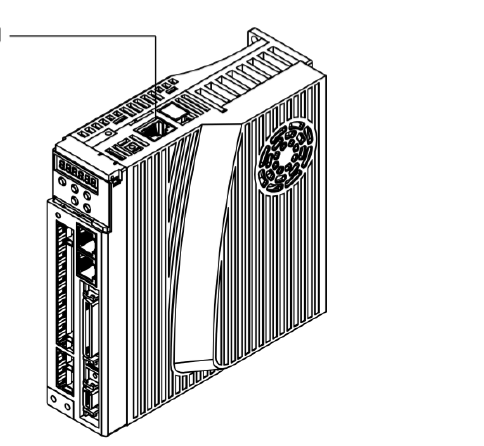
B-4-2 200-220v Absolute servo controlador


Descripció breu:
Utilitzar l'algoritme de control avançat de motors per aconseguir més velocitat de resposta de sistema, la resposta de freqüència de l'bucle de corrent de 2.5KHz, resposta de freqüència de l'bucle de velocitat de 1.6kHz i comunicació velocitat de 100 Mbps.
alt ordre K5 unitat de servo sèrie tipus de pols
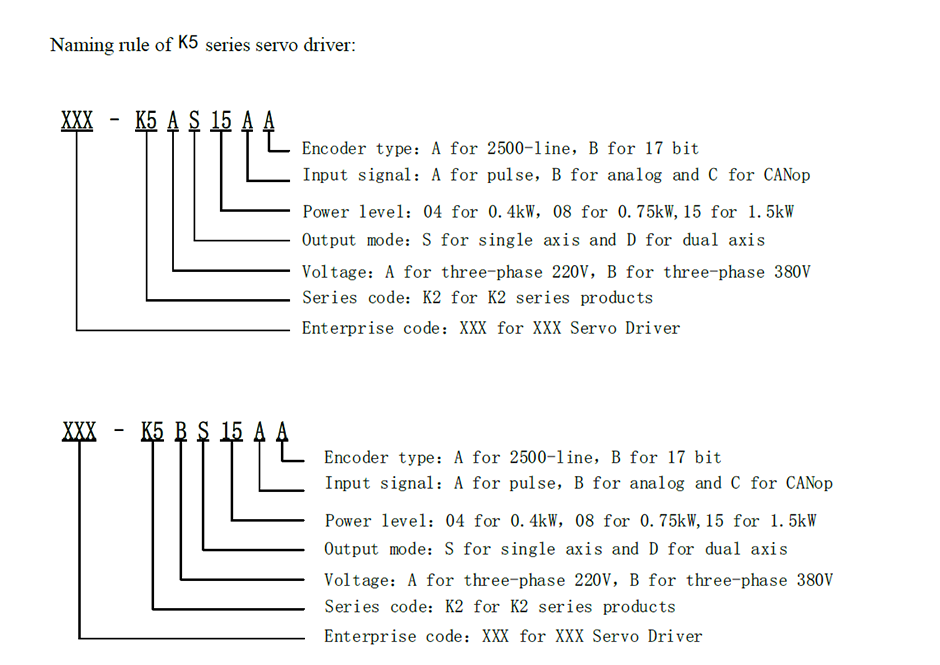
1. Servo model de la unitat:
K5 unitat de servo sèrie
200-220v controlador absolut servo
ZSD-K5AS02AB
ZSD-K5AS04AB
ZSD-K5AS08AB
ZSD-K5AS15AB
ZSD-K5AS20AB
ZSD-K5AS30AB
2. índexs tècnics
1. Gamma d'energia: 50W ~ 3 kW
tensió 2. Entrada: 1111 monofàsic o trifàsic 220VAC (- 15 ~ + 10%), 50 ~ 60Hz
3. Mode de control: control de posició
tipus 4. Codificador: / T incrementals fotoelèctrica codificador 17bit / 20bit / 23bit codificador valor 2500C (provincial / no provincial), absolut
5. Mode de comunicació: RS232, RS485
6. entrada i sortida punts: IO programables, suport positiu i configuració de lògica negativa i reubicació funció, 10 entrades, 6 sortides
7. Funció de Monitorització de: proporcionar 16 classes d'estat de vigilància com posició, velocitat, corrent, voltatge, entrada i sortida
3. Avantatges de l'producte
1. Ús algoritme de control avançat de motors per aconseguir la capacitat de resposta més ràpida de sistema, la resposta de freqüència de l'bucle de corrent de 2.5KHz, resposta de freqüència de l'bucle de velocitat de 1.6kHz i comunicació velocitat de 100 Mbps.
2. En l'estat de funcionament real, les s'infereix de l'filtre adaptatiu la freqüència de ressonància d'acord amb la component de vibració en la velocitat de motor, i estableix automàticament el coeficient de l'filtre de osca per eliminar el component de ressonància, per tal de reduir la vibració del punt de ressonància .
3. ajust de guany automàtic en temps real per a estimar les característiques de càrrega de la màquina, i estableix el valor de guany de base corresponent a la rigidesa i el valor de compensació de fricció corresponent d'acord amb el resultat.
4. Cap funció de supressió de fluctuació, calcular i compensar la freqüència de vibració, i eliminar fluctuacions de baixa freqüència.
5. És compatible amb el programari de PC de l'ordinador superior als paràmetres establerts (càrrega, descàrrega, reset, importació i exportació); la forma d'ona monitoratge (suporta estalvi automàtic de formes d'ona abans i després de la falla, la trucada, la reproducció, l'anàlisi del mesurament, la transformació lineal i anàlisi FFT de les dades de forma d'ona històrics en cas de fallada); que dóna suport a la posició de l'servo, control de velocitat i parell, iniciar i aturar, avançar i control invers. , Monitorització d'estat, un diagnòstic d'errors i altres operacions;
6. Funció de seguretat corresponent a la norma internacional està unida, STO / SS1 / SS2 / SBC, segur i fiable. 二, paràmetres tècnics:
1. Tensió d'alimentació: 220 V;
potència 2. Sortida: 220V (0,4 kW, 0.75KW, 1,5 KW);
3. Codificador: 2500C / T encoder incremental / provincial, 17bit / 20bit / 23bit encoder valor absolut;
4. IO digital de senyal: entrada de 8 canals i 6 canals de sortida es pot utilitzar per a l'ajust de la funció;
5. senyal analògic: 2 entrades;
6. Mode de comunicació: RS232, protocol Modbus estàndard, bus CANopen;
4. Avantatges de l'producte:
1. Mode de posició interna de gran abast pot planificar multi-ruta de funcionament continu per aconseguir les funcions de control de moviment rics; que pot suportar fins a 32 grups de planificació de dades, i cada grup de dades pot establir el nombre o l'angle de polsos d'acord amb la demanda, i es pot establir la velocitat, l'acceleració, la desacceleració i la desacceleració d'emergència de manera de posició interna;
2. mesurar automàticament les característiques mecàniques d'inèrcia de la càrrega, establir el guany òptima, i escurçar el sistema de temps de depuració;
3. Anàlisi de freqüència de ressonància mecànica, equipat amb dos conjunts de filtres de osca, que pot ajustar la freqüència (50 ~ 5000Hz) i profunditat de l'osca, de manera efectiva superar la ressonància de baixa freqüència i la vibració a l'extrem mecànica, i pot establir la freqüència de vibració ( 1 ~ 100 Hz) i amortiment de les vibracions;
4. La fricció de bat funció de compensació pot reduir la influència de la fricció estàtica durant la mecànica de marxa enrere i millorar la següent comanda rendiment de funcionament a baixa velocitat;
5. suport de programari de depuració, anàlisi mecànica característiques, ajust de paràmetres, monitoratge i altres funcions, maneig intuïtiu i simple. 二, paràmetre Especificació