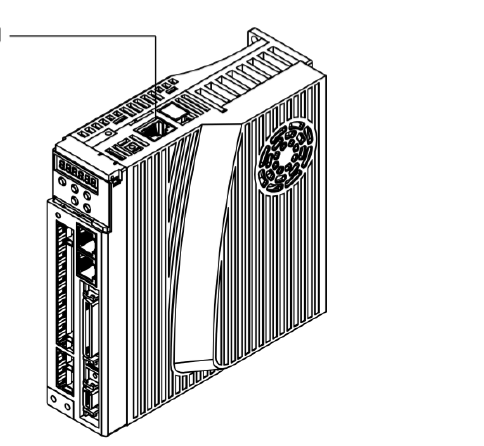
B-4-2 200-220v ຂັບ Absolute servo


ລາຍລະອຽດສັ້ນ:
ໃຊ້ຂັ້ນຕອນວິທີການຄວບຄຸມມໍເຕີແບບພິເສດທີ່ຈະບັນລຸຄວາມຮັບຜິດຊອບລະບົບໄວຂຶ້ນ, ຕອບສະຫນອງຄວາມຖີ່ວົງໃນປະຈຸບັນຂອງ 2.5KHz, ຄວາມໄວຕອບສະຫນອງຄວາມຖີ່ loop ຂອງ 1.6kHz ແລະການສື່ສານອັດຕາຂອງ 100Mbps.
K5 ໄດສັ່ງສູງຊະນິດກໍາມະຈອນເຕັ້ນຊຸດ servo
1. ຮູບແບບໄດ Servo:
ໄດ K5 Series servo
200-220v Absolute servo ຂັບ
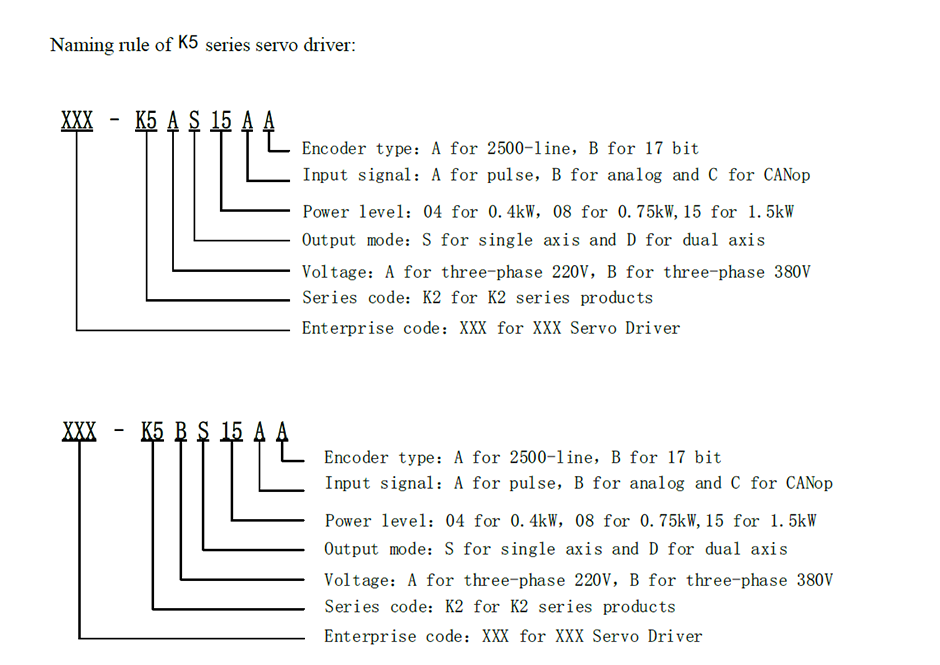
ZSD-K5AS02AB
ZSD-K5AS04AB
ZSD-K5AS08AB
ZSD-K5AS15AB
ZSD-K5AS20AB
ZSD-K5AS30AB
2. ດັດຊະນີ Technical
1. ລະດັບພະລັງງານ: 50W ~ 3kW
2. ປ້ອນຂໍ້ມູນແຮງດັນ: 1111 ດຽວໄລຍະຫຼືສາມໄລຍະ 220VAC (- 15 ~ + 10%), 50 ~ 60Hz
ຮູບແບບ 3 ການຄວບຄຸມ: ການຄວບຄຸມຕໍາແຫນ່ງ
ປະເພດ 4. Encoder: 2500C / T incremental photoelectric ເອັນໂຄດເດີ (ແຂວງ / ບໍ່ແຂວງ), 17bit / 20bit / 23bit ເຂົ້າລະຫັດຄ່າຢ່າງແທ້ຈິງ
5. ຮູບແບບການສື່ສານ: RS232, RS485
6. Input ແລະຜົນຜະລິດຈຸດ: IO ໂປລແກລມ, ສະຫນັບສະຫນູນໃນທາງບວກແລະການຕັ້ງຄ່າຕາມເຫດຜົນໃນທາງລົບແລະການຍົກຍ້າຍຫນ້າທີ່, 10 ວັດຖຸດິບ, 6 ຜົນ
7 ຫນ້າທີ່ຕິດຕາມກວດກາ: ໃຫ້ 16 ປະເພດຂອງສະຖານະພາບຕິດຕາມກວດກາເຊັ່ນ: ຕໍາແຫນ່ງ, ຄວາມໄວ, ປະຈຸບັນ, ແຮງດັນໄຟຟ້າ, ວັດສະດຸປ້ອນແລະຜົນຜະລິດ
3 ຂໍ້ຜະລິດຕະພັນ
1. ການນໍາໃຊ້ຂັ້ນຕອນວິທີການຄວບຄຸມມໍເຕີແບບພິເສດເພື່ອບັນລຸໄວຄວາມຮັບຜິດຊອບລະບົບ, ມີການຕອບສະຫນອງຄວາມຖີ່ວົງໃນປະຈຸບັນຂອງ 2.5KHz, ຄວາມໄວຕອບສະຫນອງຄວາມຖີ່ loop ຂອງ 1.6kHz ແລະການສື່ສານອັດຕາຂອງ 100Mbps.
2. ໃນຖານະປະຕິບັດງານຕົວຈິງ, ການສະຫຼຸບການກັ່ນຕອງການປັບຄວາມຖີ່ resonance ຕາມອົງປະກອບການສັ່ນສະເທືອນໃນຄວາມໄວ motor, ແລະອັດຕະໂນມັດກໍານົດຕົວຄູນຂອງການກັ່ນຕອງ notch ໃນການເຄື່ອນຍ້າຍອົງປະກອບ resonance ໄດ້, ສະນັ້ນທີ່ຈະເປັນການຫຼຸດຜ່ອນການສັ່ນສະເທືອນຂອງຈຸດ resonance ໄດ້ .
3 ທີ່ໃຊ້ເວລາທີ່ແທ້ຈິງການປັບເພີ່ມອັດຕະໂນມັດເພື່ອປະເມີນລັກສະນະການໂຫຼດຂອງເຄື່ອງ, ແລະກໍານົດມູນຄ່າເພີ່ມພື້ນຖານທີ່ສອດຄ້ອງກັນກັບຄວາມເຂັ້ມງວດແລະມູນຄ່າການຊົດເຊີຍແຮງສຽດທານທີ່ສອດຄ້ອງກັນອີງຕາມຜົນໄດ້ຮັບ.
4. ສຸດທ້າຍຫນ້າທີ່ກະວົນກະວາຍສະກັດກັ້ນ, ຄິດໄລ່ແລະຊົດເຊີຍຄວາມຖີ່ການສັ່ນສະເທືອນ, ແລະສະກັດກັ້ນກະວົນກະວາຍຕ່ໍາຄວາມຖີ່.
5. ມັນສະຫນັບສະຫນູນຊອບແວຄອມພິວເຕີຂອງຄອມພິວເຕີເທິງຕົວກໍານົດການທີ່ກໍານົດໄວ້ (ອັບໂຫລດ, ດາວໂຫລດ, ປັບ, ການນໍາເຂົ້າແລະສົ່ງອອກ) ສະແດງຄື້ນຕິດຕາມກວດກາ (ສະຫນັບສະຫນຸນການປະຫຍັດອັດຕະໂນມັດຂອງການສະແດງຄື້ນກ່ອນແລະຫຼັງຈາກຄວາມຜິດ, ການໂທຫາ, ການຫຼິ້ນ, ການວິເຄາະການວັດແທກ, ການຫັນເປັນຮູບແຂບແລະການວິເຄາະ FFT ຂໍ້ມູນສັນຍານປະຫວັດສາດໃນກໍລະນີຂອງຄວາມຜິດ); ມັນສະຫນັບສະຫນູນຕໍາແຫນ່ງ servo, ຄວາມໄວແລະແຮງບິດຄວບຄຸມ, ເລີ່ມຕົ້ນແລະຢຸດ, ຕໍ່ແລະຄວບຄຸມໄດ້ຢ່າງສິ້ນເຊີງ. ຕິດຕາມກວດກາສະຖານະພາບ, ຜິດວິນິດໄສແລະການດໍາເນີນງານອື່ນໆ;
6. ຫນ້າທີ່ຄວາມປອດໄພກ່ຽວຂ້ອງກັບມາດຕະຖານລະຫວ່າງປະເທດຕິດຂັດ, sto / SS1 / SS2 / SBC, ຄວາມປອດໄພແລະເຊື່ອຖືໄດ້. 二, ຕົວກໍານົດການດ້ານວິຊາການ:
1. ສະຫນອງແຮງດັນໄຟຟ້າ: 220V;
ພະລັງງານ 2. ເປົ້າ: 220V (0.4KW, 0.75KW, 15KW);
3 Encoder: 2500C / T incremental / ເຂົ້າລະຫັດແຂວງ, 17bit / 20bit / 23bit ມູນຄ່າຢ່າງແທ້ຈິງເຂົ້າລະຫັດ;
4. Digital IO ສັນຍານ: ວັດສະດຸປ້ອນ 8 ຊ່ອງທາງແລະ 6 ຊ່ອງທາງອອກສາມາດໄດ້ຮັບການນໍາໃຊ້ສໍາລັບການຕັ້ງຄ່າການເຮັດວຽກ;
5. ສັນຍານ Analog: 2 ປັດໄຈນໍາເຂົ້າ;
6 ຮູບແບບການສື່ສານ: RS232, ມາດຕະຖານອະນຸສັນຍາ Modbus, ລົດເມ CANopen;
4. ຂໍ້ຜະລິດຕະພັນ:
1. ຮູບແບບການຕໍາແຫນ່ງພາຍໃນປະສິດທິພາບສາມາດວາງແຜນຫຼາຍເສັ້ນທາງປະຕິບັດງານຢ່າງຕໍ່ເນື່ອງເພື່ອບັນລຸຫນ້າທີ່ຄວບຄຸມການເຄື່ອນໄຫວອຸດົມສົມບູນ; ມັນສາມາດຮອງຮັບໄດ້ເຖິງ 32 ກຸ່ມການວາງແຜນຂໍ້ມູນ, ແລະໃນແຕ່ລະກຸ່ມຂອງຂໍ້ມູນສາມາດກໍານົດຈໍານວນຫຼືມຸມຂອງກໍາມະຈອນເຕັ້ນຕາມຄວາມຕ້ອງການ, ແລະສາມາດກໍານົດຄວາມໄວ, ເລັ່ງ, deceleration ແລະ deceleration ສຸກເສີນຂອງຮູບແບບຕໍາແຫນ່ງພາຍໃນ;
2. ການວັດແທກອັດຕະໂນມັດລັກສະນະກົນຈັກຂອງ inertia ໂຫຼດ, ກໍານົດເພີ່ມທີ່ດີທີ່ສຸດ, ແລະຫຼຸດລະບົບທີ່ໃຊ້ເວລາແກ້ຈຸດບົກພ່ອງ;
3. ການວິເຄາະຄວາມຖີ່ resonance ກົນ, ໂດຍມີສອງຊຸດຂອງການກັ່ນຕອງ notch, ເຊິ່ງສາມາດປັບຄວາມຖີ່ຂອງການ (50 ~ 5000Hz) ແລະຄວາມເລິກ notch, ປະສິດທິພາບເອົາຊະນະ resonance ຕ່ໍາຄວາມຖີ່ແລະການສັ່ນສະເທືອນຢູ່ໃນຕອນທ້າຍຂອງກົນຈັກ, ແລະສາມາດກໍານົດຄວາມຖີ່ການສັ່ນສະເທືອນ ( 1 ~ 100Hz) ແລະການສັ່ນສະເທືອນໃຫ້ຫົດຫູ່ໃຈ
4. ການ friction torque ຫນ້າການຊົດເຊີຍສາມາດຫຼຸດຜ່ອນອິດທິພົນຂອງ friction ຄົງທີ່ໃນໄລຍະກົນໄກການຫັນປ່ຽນແລະປັບປຸງຄໍາສັ່ງການປະຕິບັດຂອງການດໍາເນີນງານຄວາມໄວຕ່ໍາດັ່ງຕໍ່ໄປນີ້;
5. ສະຫນັບສະຫນູນຊອບແວ Debugging, ການວິເຄາະກົນຈັກລັກສະນະ, ການຕັ້ງຄ່າພາລາມິເຕີການຕິດຕາມແລະປະຕິບັດຫນ້າອື່ນໆ, ປະຕິບັດງານງ່າຍແລະງ່າຍດາຍ. 二, ຕົວກໍານົດການຂໍ້ມູນຈໍາເພາະ