The application of ZSD servo drive & Hxdwh servo motor in the aluminum ingot stacker
1.System description
Aluminum ingot stacker is mainly used in electrolytic aluminum industry, and its working in high temperature environment. Aluminum ingot stacking manipulator is mainly used to stack objects according to certain stacking requirements. The cast aluminum ingot is first buckled in the cooling tank and transported out of the cooling tank by the “grab manipulator”; then, the space position and direction of the aluminum ingot to be grabbed need to be changed by the turning device to meet the stacking requirements. Finally, the aluminum ingot is grabbed by the “place manipulator” and stacked according to the requirements. Servo driver is mainly used to control the movement of horizontal axis and vertical axis to control the position of grasping and placing aluminum ingot.
2.Servo requirements of aluminum ingot stacker system
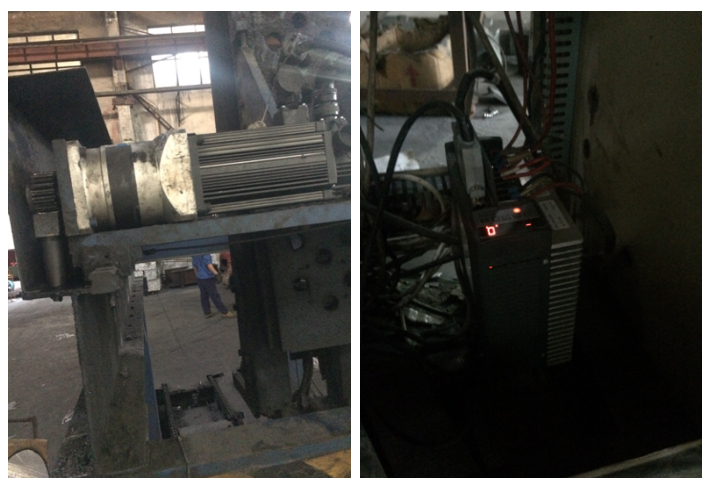
The servo system of the aluminum ingot stacker is mainly composed of two sets of servo drivers and motors. The horizontal shaft is mainly composed of ZSD-GA3215 and 110ST-M10020 motors. The vertical shaft is composed of ZSD-GA3230B and 110ST-M10010 motor. The positioning is carried out by the combination of these two motor, in which the front of the horizontal shaft is equipped with a reducer to increase the output torque. The site drawing is shown below:
Introduction to industry matching performance
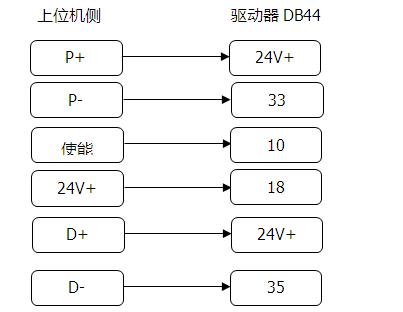
The host computer is connected with the control terminal of the servo driver. The control mode is pulse + direction in the position mode. The host computer sends the position command to the servo driver. The servo driver drives the motor to complete the stacking process according to the specified action. The control terminal wiring is defined as follows:
Application and debugging of ZSD servo drive in the aluminum ingot stacker
1、Servo drive and motor configuration
| Product serial number | G-B series servo driver | |
| Software version | 1.18 | |
| Servo driver model | ZSD-GA3215 | ZSD-GA3230B |
| Servo motor model | 110ST-M10025 | 110ST-M10015 |
2.Related parameter settings
⑴Electronic gear ratio
Control resolution according to specific application requirements
⑵Integral time constant of velocity loop
When this parameter is reduced, the speed responsiveness can be improved and the speed control error can be reduced. However, if the setting is too small, it is easy to generate vibration and noise, the greater the parameter, the worse the rigidity.
⑶Reverse low 4-bit input
⑷Velocity loop proportional gain
When the gain value is increased, the speed responsiveness can be improved. But if the setting is too large, it is easy to produce vibration and noise.
⑸Integral time constant of velocity loop
When this parameter is reduced, the speed responsiveness can be improved and the speed control error can be reduced. But if the setting is too small, it is easy to produce vibration and noise, and the larger the parameter is, the worse the rigidity is.
Post time: Mar-04-2020