ປະເພດ B-8-2 IK3 Series Ethercat ລົດ 380-400V


ລາຍລະອຽດສັ້ນ:
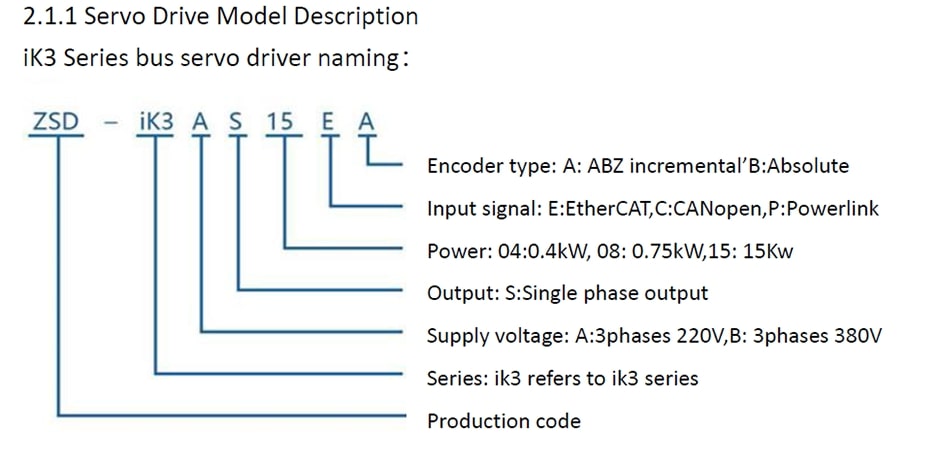
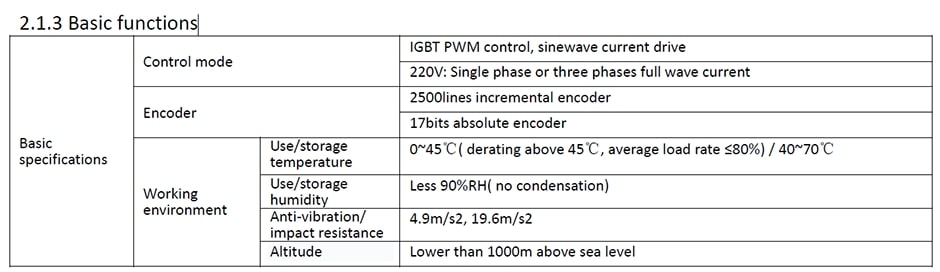
ລະດັບພະລັງງານ: ແຮງດັນ Input 50W ~ 5kw: ດຽວໄລຍະຫຼືສາມໄລຍະ 220VAC (- 15 ~ + 10%), 50 ~ 60Hz ການຄວບຄຸມຮູບແບບການ: ການຄວບຄຸມຕໍາແຫນ່ງ, ການຄວບຄຸມຄວາມໄວ, ການຄວບຄຸມ torque, ການຄວບຄຸມລົດເມ
ວິທະຍາໄລລົດເມ ik3 ໄດຊຸດ servo
1. ຮູບແບບໄດ Servo:
ປະເພດ IK3 Series Ethercat ລົດ 380-400V
ZSD-IK3BS302EB
ZSD-IK3BS502EB
ZSD-IK3BS752EB
2. ດັດຊະນີ Technical
1. ລະດັບພະລັງງານ: 50W ~ 5kw
2 ແຮງດັນ Input: ດຽວໄລຍະຫຼືສາມໄລຍະ 220VAC (- 15 ~ + 10%), 50 ~ 60Hz
3. ການຄວບຄຸມຮູບແບບການ: ການຄວບຄຸມຕໍາແຫນ່ງ, ການຄວບຄຸມຄວາມໄວ, ການຄວບຄຸມ torque, ການຄວບຄຸມລົດເມ
ປະເພດ 4. Encoder: 2500C / T incremental photoelectric ເອັນໂຄດເດີ (ແຂວງ / ບໍ່ແຂວງ), 17bit / 20bit / 23bit ເຂົ້າລະຫັດຄ່າຢ່າງແທ້ຈິງ
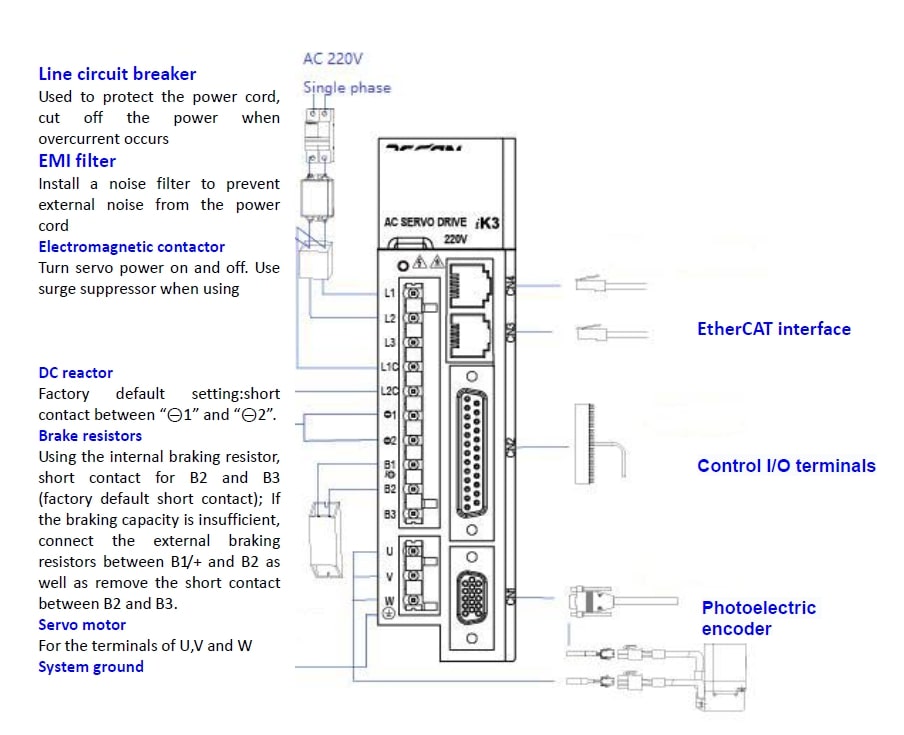
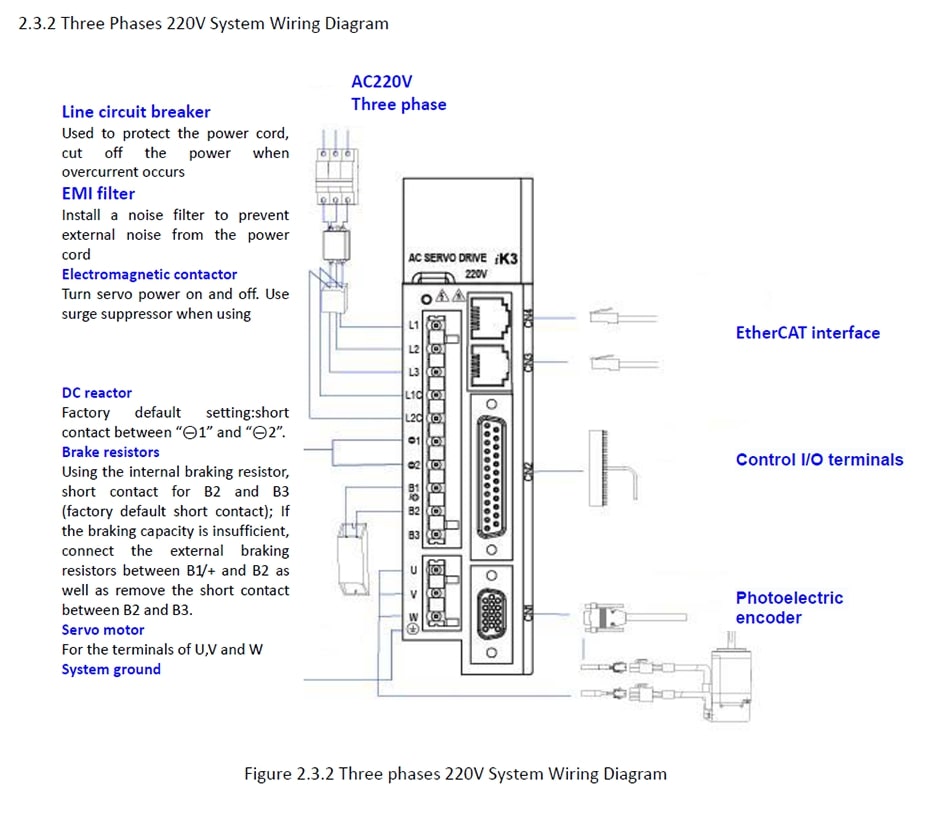
5. ຮູບແບບການສື່ສານ: EtherCAT, Powerlink, CANopen
6. Input ແລະຜົນຜະລິດຈຸດ: IO ໂປລແກລມ, ສະຫນັບສະຫນູນໃນທາງບວກແລະການຕັ້ງຄ່າຕາມເຫດຜົນໃນທາງລົບແລະການຍົກຍ້າຍຫນ້າທີ່, 5 ວິທີການປ້ອນຂໍ້ມູນສະຫນັບສະຫນູນ 16 ການຕັ້ງຄ່າທີ່ເປັນປະໂຫຍດ, 3 ວິທີການສະຫນັບສະຫນູນ 12 ຜົນຜະລິດການຕັ້ງຄ່າທີ່ເປັນປະໂຫຍດ.


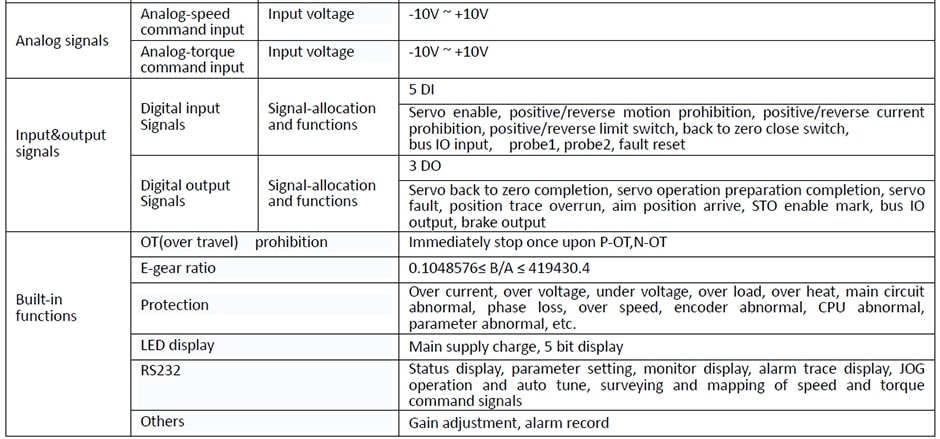


7 ຫນ້າທີ່ຕິດຕາມກວດກາ: ໃຫ້ 16 ປະເພດຂອງສະຖານະພາບຕິດຕາມກວດກາເຊັ່ນ: ຕໍາແຫນ່ງ, ຄວາມໄວ, ປະຈຸບັນ, ແຮງດັນໄຟຟ້າ, ວັດສະດຸປ້ອນແລະຜົນຜະລິດ.
3 ຂໍ້ຜະລິດຕະພັນ
1. ປັດຈຸບັນການຕອບສະຫນອງຄວາມຖີ່ loop ເປັນ 2.5KHz, ຕອບສະຫນອງຄວາມຖີ່ loop ຄວາມໄວສູງ 1.6kHz, ແລະອັດຕາການສື່ສານແມ່ນ 100Mbps.
2. ດ້ວຍຄວາມຫລາກຫລາຍຂອງການຫັກລົບກັ່ນຕອງເພື່ອປັບປຸງຄວາມຫມັ້ນຄົງການຄວບຄຸມແລະສະຫນັບສະຫນູນການວາງແຜນ, ການເລັ່ງແລະ deceleration ຕັ້ງຄ່າ curve ຄວາມໄວແລະຄວາມເລັ່ງແລະ deceleration fillets ສາມາດກໍານົດໄວ້.
3 ສຸດທ້າຍຫນ້າທີ່ກະວົນກະວາຍສະກັດກັ້ນ, ການທໍາງານຂອງການຊົດເຊີຍ friction, motor cogging ຫນ້າຊົດເຊີຍ torque.
4. ສະຫນັບສະຫນຸນການຄວບຄຸມສະນະແມ່ເຫຼັກອ່ອນແອ. ໃນຄວາມໄວສູງແລະປະຕິບັດງານໂຫຼດແສງສະຫວ່າງສະຖານະການ, ຄວາມໄວມໍເຕີສາມາດສືບຕໍ່ເພີ່ມສູງຂຶ້ນ.
5. ມັນສະຫນັບສະຫນູນປັບຕົວກໍານົດການ, ການຮຽນຮູ້ຕົນເອງ, inching, query ປະຫວັດສາດຄວາມຜິດແລະບຸກເບີກພື້ນທີ່ປະຫວັດສາດຄວາມຜິດຂອງປະຕິບັດຫນ້າອົງການຊ່ອຍເຫລືອຕ່າງໆ.
6. ສະຫນັບສະຫນຸນຊອຟແວຄອມພິວເຕີຂອງຄອມພິວເຕີເທິງຕົວກໍານົດການທີ່ກໍານົດໄວ້ (ອັບໂຫລດ, ດາວໂຫລດ, ປັບ, ການນໍາເຂົ້າແລະສົ່ງອອກ) ສະແດງຄື້ນຕິດຕາມກວດກາ (ສະຫນັບສະຫນຸນການປະຫຍັດອັດຕະໂນມັດຂອງການສະແດງຄື້ນກ່ອນແລະຫຼັງຈາກຄວາມຜິດ, ການໂທຫາ, ການຫຼິ້ນ, ການວິເຄາະການວັດແທກ, ການຫັນເປັນຮູບແຂບແລະການວິເຄາະ FFT ຂໍ້ມູນສັນຍານປະຫວັດສາດໃນກໍລະນີຂອງຄວາມຜິດ); ມັນສະຫນັບສະຫນູນຕໍາແຫນ່ງ servo, ຄວາມໄວແລະແຮງບິດຄວບຄຸມ, ເລີ່ມຕົ້ນແລະຢຸດ, ຕໍ່ແລະຄວບຄຸມໄດ້ຢ່າງສິ້ນເຊີງ. ຕິດຕາມກວດກາສະຖານະພາບ, ຜິດວິນິດໄສແລະການດໍາເນີນງານອື່ນໆ;
7 ສະຫນັບສະຫນູນການສື່ສານ servo ໄດທີ່ມີທີ່ຢູ່ທີ່ແຕກຕ່າງກັນ;
8. ຫນ້າທີ່ຄວາມປອດໄພກ່ຽວຂ້ອງກັບມາດຕະຖານລະຫວ່າງປະເທດຕິດຂັດ, sto / SS1 / SS2 / SBC, ຄວາມປອດໄພແລະເຊື່ອຖືໄດ້.
9. ມັນສາມາດທີ່ຕິດກັບຄະນະກໍາມະການດໍາເນີນງານມືຈັດຂຶ້ນໃນວັນສໍາລັບການຕັ້ງຄ່າພາລາມິເຕີແລະຕິດຕາມກວດກາຂອງ servo ແລະສະຖານະພາບມໍເຕີ, ເຮັດໃຫ້ລະບົບ debugging ສະດວກຫຼາຍ.





