B-8-2 IK3 Series Ethercat Bus hom 380-400V


Luv hauj lwm:
Hwj chim ntau yam: 50W ~ 5KW tswv yim voltage: ib-theem los yog peb theem 220VAC (- 15 ~ + 10%), 50 ~ 60Hz Control hom: txoj hauj lwm tswj, ceev tswj, torque tswj, chaw tos tsheb loj tswj
Universal tsheb npav ik3 series servo tsav
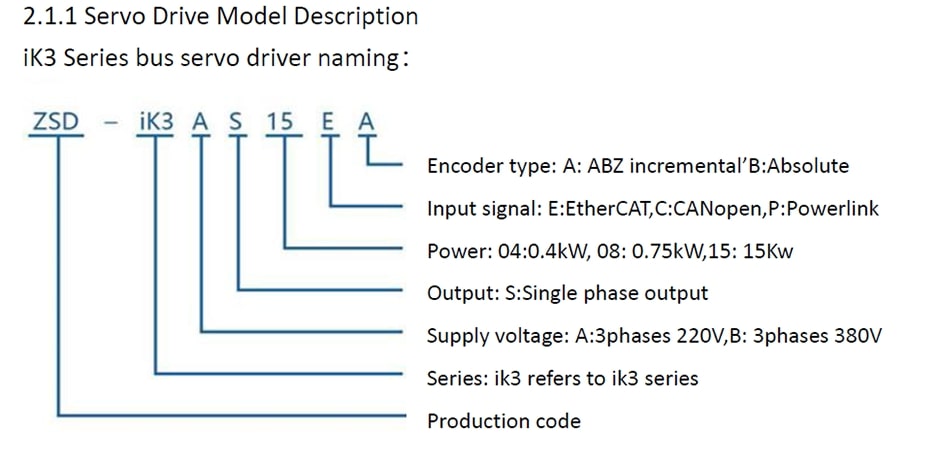
1. Servo tsav qauv:
IK3 Series Ethercat Bus hom 380-400V
ZSD-IK3BS302EB
ZSD-IK3BS502EB
ZSD-IK3BS752EB
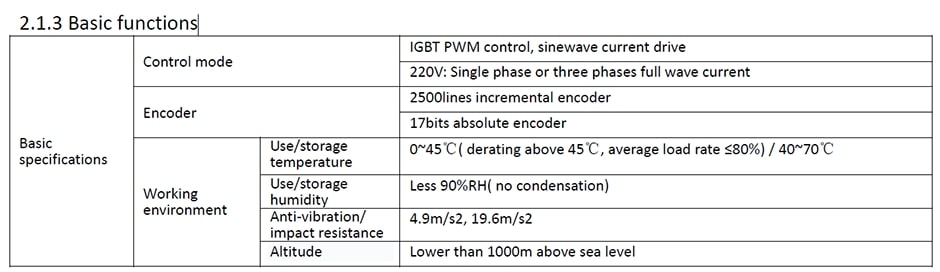
2. Kev indexes
1. Hwj chim ntau yam: 50W ~ 5KW
2. tswv yim voltage: ib-theem los yog peb theem 220VAC (- 15 ~ + 10%), 50 ~ 60Hz
3. Control hom: txoj hauj lwm tswj, ceev tswj, torque tswj, chaw tos tsheb loj tswj
4. Encoder hom: 2500C / T incremental photoelectric encoder (lub xeev / non lub xeev), 17bit / 20bit / 23bit qho tus nqi encoder
5. Kev sib txuas lus hom: EtherCAT, Powerlink, CANopen
6. Tswv yim thiab tso zis ntsiab lus: rhuav tshem cov ntaub programmable, txhawb zoo thiab tsis zoo logic chaw thiab muaj nuj nqi nyaj, 5-txoj kev tswv yim txhawb 16 haumxeeb configurations, 3-txoj kev tso zis txhawb 12 haumxeeb configurations.


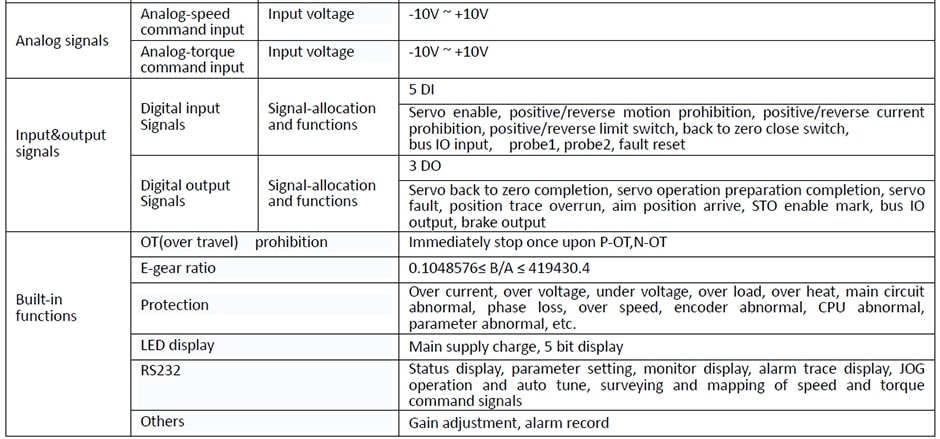


7. Xyuas muaj nuj nqi: muab 16 hom ntawm raws li txoj cai saib xyuas xws li txoj hauj lwm, ceev, tam sim no, voltage, tswv yim thiab cov zis.
3. Khoom zoo
1. Tam sim no lub voj zaus teb yog 2.5KHz, ceev voj zaus teb yog 1.6kHz, thiab kev sib txuas lus tus nqi yog 100Mbps.
2. Muaj ib tug ntau yam ntawm kev rho tawm ntxaij lim dej los txhim kho cov kev tswj stability thiab txhawb cov kev ceev nkhaus npaj, acceleration thiab deceleration chaw thiab acceleration thiab deceleration fillets yuav ua tau teeb.
3. End jitter hluav muaj nuj nqi, kev sib txhuam nyiaj muaj nuj nqi, lub cev muaj zog cogging torque nyiaj muaj nuj nqi.
4. Nws txhawb zog nqus tswj. Nyob rau hauv lub high-ceev thiab lub teeb load lag luam qhov teeb meem no, lub cev muaj zog ceev yuav mus kom sawv.
5. Nws txhawb parameter pib dua, nws tus kheej-kev kawm, inching, txhaum keeb kwm cov lus nug thiab txhaum keeb kwm clearing ntawm ntau yam koom haum pab zog.
6. Nws txhawb PC software ntawm sab sauv computer rau txheej tsis (upload, download, pib dua, ntshuam thiab export); waveform saib xyuas (nws txhawb automatic saving ntawm waveforms ua ntej thiab tom qab lub txhaum, hu, playback, kev ntsuas tsom xam, linear transformation thiab FFT tsom xam ntawm cov keeb kwm waveform cov ntaub ntawv nyob rau hauv cov ntaub ntawv ntawm kev txhaum); nws txhawb servo txoj hauj lwm, ceev thiab torque tswj, pib thiab nres, rau pem hauv ntej thiab rov qab tswj. , Raws li txoj cai saib xyuas, kev txhaum mob thiab lwm yam kev ua hauj lwm;
7. Kev them nyiaj yug servo tsav kev sib txuas lus nrog txawv chaw nyob;
8. Kev Nyab Xeeb muaj nuj nqi coj mus thoob ntiaj teb txuj no yog daim ntawv, sto / SS1 / SS2 / SBC, muaj kev ruaj ntseg thiab txhim khu kev qha.
9. Nws yuav txawm peem rau nrog txhais tes tuav lag luam vaj huam sib luag rau parameter chaw thiab saib xyuas ntawm servo thiab lub cev muaj zog raws li txoj cai, uas ua rau system debugging ntau yooj yim.