B-8-2 IK3 Serie Ethercat Bus Typ 380-400V


Kuerz Beschreiwung:
Power Gamme: 50W ~ 5KW check Volt: Single-Phase oder dräi-Phase 220VAC (- 15 ~ + 10%), 50 ~ 60Hz Kontrolléiere Modus: Positioun Kontroll, Vitesse Kontroll, Dréimoment Kontroll, Bus Kontroll
Universal Bus ik3 Serie Servo fueren
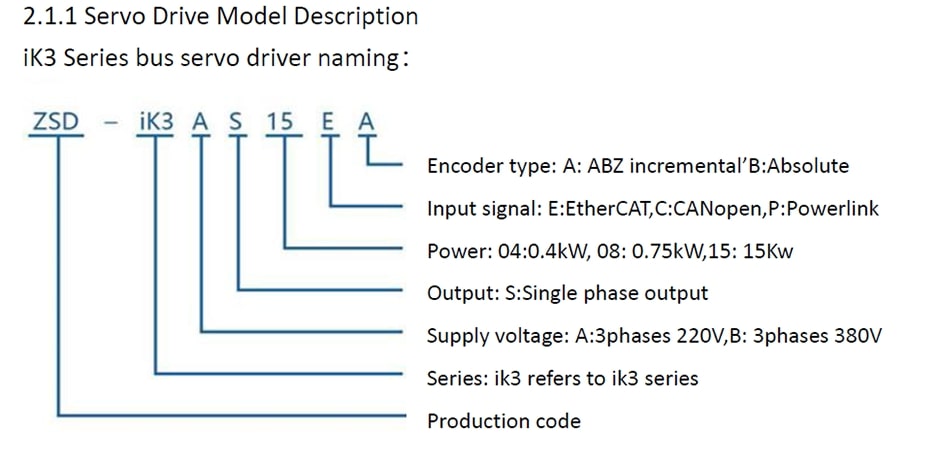
1. Servo fueren Model:
IK3 Serie Ethercat Bus Typ 380-400V
ZSD-IK3BS302EB
ZSD-IK3BS502EB
ZSD-IK3BS752EB
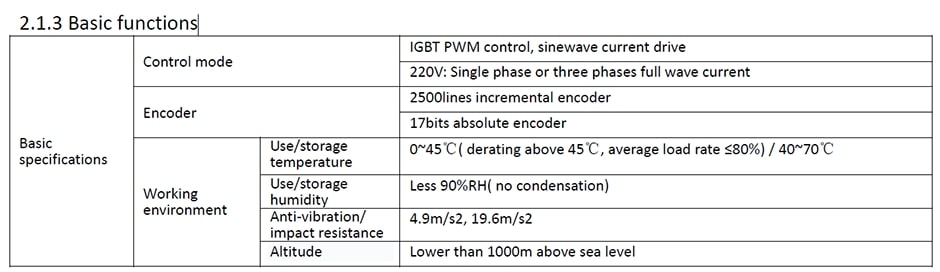
2. Technesch wand
1. Power Gamme: 50W ~ 5KW
2. check Volt: Single-Phase oder dräi-Phase 220VAC (- 15 ~ + 10%), 50 ~ 60Hz
3. Kontrolléiere Modus: Positioun Kontroll, Vitesse Kontroll, Dréimoment Kontroll, Bus Kontroll
4. Encoder Typ: 2500C / T fortlafend photoelectric encoder (provinciales / Net provinciales), 17bit / 20bit / 23bit absolute Wäert encoder
5. Kommunikatioun Modus: EtherCAT, Powerlink, CANopen
6. staatlechen Wasserstoff Punkten: IO programmable, Ënnerstëtzung positiv an negativ Logik Astellungen a Funktioun Transfer, 5-Manéier Input ënnerstëtzt 16 funktionell Konstellatioun, 3-Wee Wasserstoff ënnerstëtzt 12 funktionell Konstellatioun.


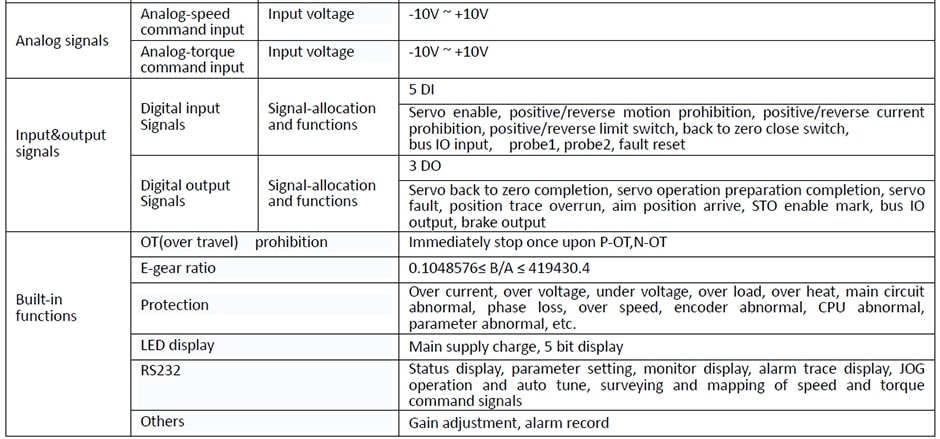


7. Funktioun Suivi: déi 16 Zorte vun Status Iwwerwachung wéi Positioun, Vitesse, aktuell, Volt, Input an Wasserstoff.
3. Product Virdeeler
1. Aktuell verantwortlech Frequenz Äntwert 2.5KHz ass, Vitesse verantwortlech Frequenz Äntwert ass 1.6kHz a Kommunikatioun Taux ass 100Mbps.
2. Mat engem ville subtraction Filtere der Kontroll Stabilitéit an Ënnerstëtzung der Vitesse Kéier Planung, Beschleunegung an bittt Astellungen an Beschleunegung an bittt Pangasius Formatioun kënnen ze verbesseren.
3. End jitter Ennerdréckung Funktioun, Reiwung Kompensatioun Funktioun, Motor cogging Gezäitekräfte Kompensatioun Funktioun.
4. Et ënnerstëtzt schwaach Magnéitfeld Kontroll. Am héich-Vitesse a Liicht opbauen Operatioun Situatioun, kann de Motor Vitesse ze klammen weidergespillt.
5. Et ënnerstëtzt Parameter Compteur, Self-Léieren, inching, Schold Geschicht Paieziedel an Schold Geschicht Linn vun verschiddenen Weibëschof Funktiounen.
6. Et ënnerstëtzt PC Software vun ieweschter Computer ze setzen Parameteren (eropluede, download, Compteur, Import an Export); Schwéngungsform Iwwerwaachung (et ënnerstëtzt automatesch spueren vun waveforms virun an no der Schold, Vocatioun, playback, Analysenmethoden, linear Transformatioun an FFT Analyse vun historeschen Schwéngungsform Daten am Fall vun Schold); et ënnerstëtzt Servo Positioun, Vitesse a Gezäitekräfte Kontroll, ufänken an ophalen, no vir an ëmgedréint Kontroll. Schold, Status Iwwerwachung, Diagnos an aner Operatiounen;
7. Support Servo fueren Kommunikatioun mat verschidden Adressen;
8. Sécherheet Funktioun ze international Norm entspriechend ass verbonnen, sto / SS1 / SS2 / SBC, sécher an zouverlässeg.
9. Et kann mat dem-ofgehalen Operatioun Rot fir Parameter Kader an Iwwerwachung vun Servo an Motor Status nees System Debugging méi praktesch equipéiert ginn.