tip B-8-2 IK3 Serje Ethercat Bus 380-400V


Deskrizzjoni fil-qosor:
firxa ta 'qawwa: vultaġġ Input 50W ~ 5KW:-fażi waħda jew tliet fażijiet 220VAC (- 15 ~ + 10%), 50 ~ 60Hz Kontroll modalità: Kontroll pożizzjoni, kontroll tal-veloċità, kontroll tat-torque, il-kontroll xarabank
Universali ik3 xarabank serje servo drive
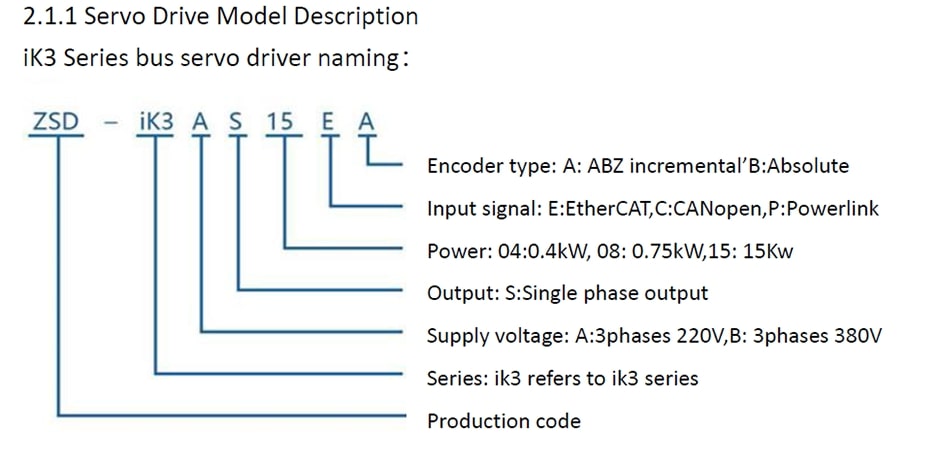
1. servo drive mudell:
tip IK3 Serje Ethercat Bus 380-400V
ZSD-IK3BS302EB
ZSD-IK3BS502EB
ZSD-IK3BS752EB
2. indiċi tekniċi
1. Firxa Power: 50W ~ 5KW
2. vultaġġ Input:-fażi waħda jew tliet fażijiet 220VAC (- 15 ~ + 10%), 50 ~ 60Hz
3. Kontroll Mod: Kontroll pożizzjoni, kontroll tal-veloċità, kontroll tat-torque, il-kontroll xarabank
tip 4. encoder: 2500C / T inkrementali fotoelettrika encoder (provinċjali / mhux provinċjali), 17bit / 20bit / 23bit valur encoder assolut
5. Mod Komunikazzjoni: EtherCAT, Enerġetika, CANopen
6. Input u output punti: programmabbli IO, l-appoġġ pożittivi u settings loġika negattivi u rilokazzjoni funzjoni, 5-mod jappoġġja input 16 konfigurazzjonijiet funzjonali, jappoġġja output 3-way 12 konfigurazzjonijiet funzjonali.




funzjoni Monitoraġġ 7.: jipprovdu 16 tipi ta 'status monitoraġġ bħal pożizzjoni, il-veloċità, kurrenti, vultaġġ, input u output.
3. Prodott vantaġġi
1. tweġiba kurrenti frekwenza linja hija 2.5KHz, reazzjoni għall-frekwenza linja veloċità hija 1.6kHz, u r-rata komunikazzjoni huwa 100Mbps.
2. Ma 'varjetà ta' tnaqqis filtri biex itejbu l-istabbiltà kontroll u jappoġġjaw l-ippjanar, aċċelerazzjoni u deċelerazzjoni settings kurva veloċità u aċċelerazzjoni u deċelerazzjoni flettijiet jistgħu jiġu stabbiliti.
3. Tmiem funzjoni soppressjoni jitter, il-funzjoni kumpens frizzjoni, mutur cogging funzjoni kumpens torque.
4. Huwa jappoġġa kontroll manjetiċi dgħajfa. Fis-sitwazzjoni ta 'veloċità għolja u l-operat tat-tagħbija dawl, il-veloċità tal-mutur jista' jkompli jikber.
5. Huwa jappoġġa parametru reset, awto-tagħlim, inching, tort istorja mistoqsija u ikklerjar istorja tort ta 'funzjonijiet awżiljarji varji.
6. Huwa jappoġġa softwer tal-kompjuter tal-kompjuter ta 'fuq parametri stabbiliti (upload, download, reset, importazzjoni u esportazzjoni); mewġa monitoraġġ (jappoġġja iffrankar awtomatiku ta 'f'forom ta' mewġ qabel u wara l-tort, li ssejjaħ, daqq, l-analiżi kejl, it-trasformazzjoni lineari u l-analiżi FFT ta 'data storika forma tal-mewġa fil-każ ta' tort); jappoġġja pożizzjoni servo, il-veloċità u tat-torque kontroll, bidu u waqfien, quddiem u l-kontroll b'lura. , Il-monitoraġġ istatus, tort dijanjosi u operazzjonijiet oħra;
7. Appoġġ komunikazzjoni servo drive ma indirizzi differenti;
8. funzjoni Sikurezza, li jikkorrespondi mal-istandard internazzjonali huwa mehmuż, STO / SS1 / SS2 / SBC, siguri u affidabbli.
9. Dan jista jkun mgħammar bord operazzjoni jinżammu fl-idejn għall-iffissar parametru u l-monitoraġġ ta 'servo u l-istatus mutur, jagħmlu s-sistema debugging aktar konvenjenti.





