B-8-1 IK3 Serie Ethercat Bus Typ 200-220V


Kurze Beschreibung:
End-Jitter-Unterdrückungsfunktion, Reibungskompensationsfunktion, Motorrastens Drehmomentkompensationsfunktion.
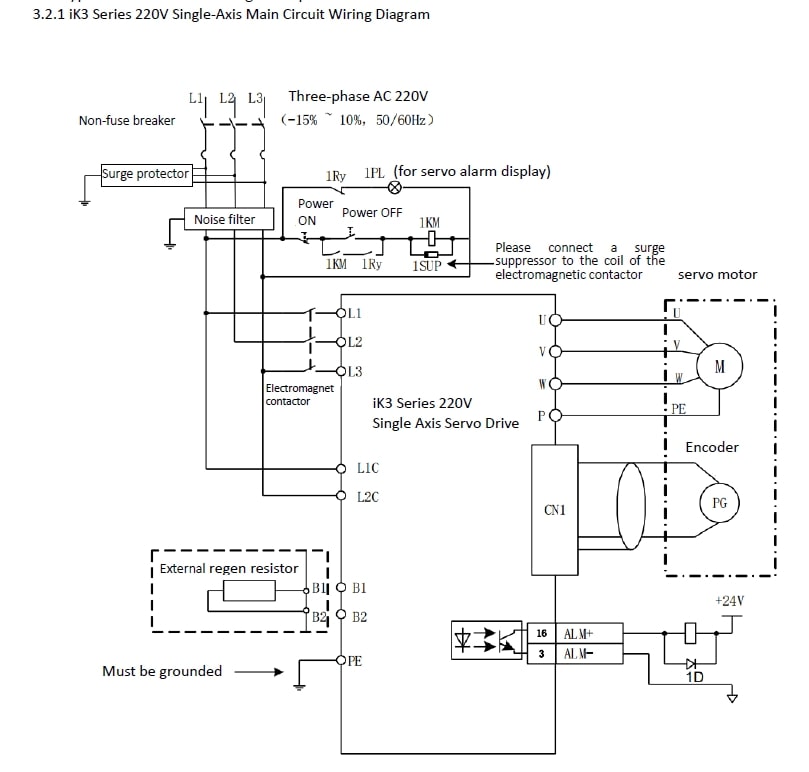
Universal-Bus ik3 Serie Servoantrieb
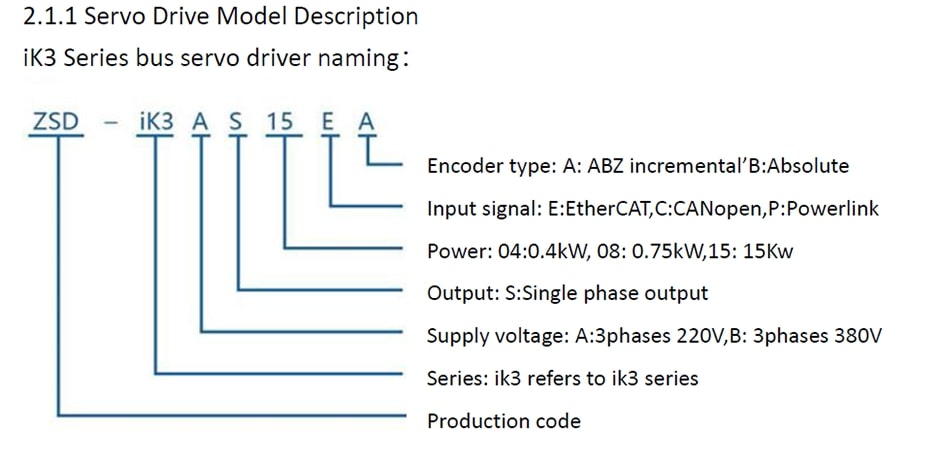
1. Servo - Antriebsmodell:
IK3 Serie Ethercat Bus Typ 200-220V
ZSD-IK3AS082EB
ZSD-IK3AS152EB
ZSD-IK3AS222EB
ZSD-IK3AS302EB
ZSD-IK3AS502EB
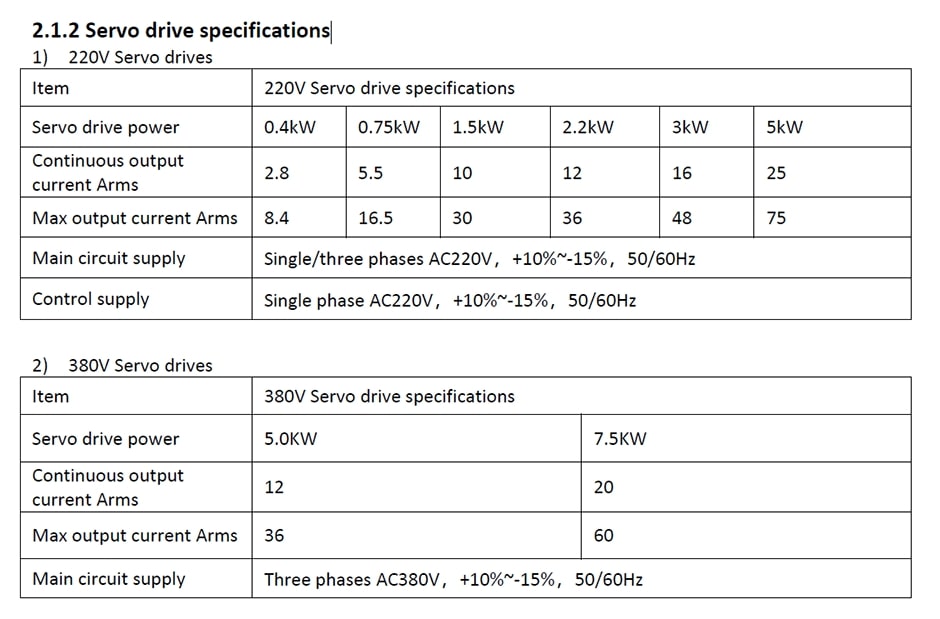
2. Technischer Indizes
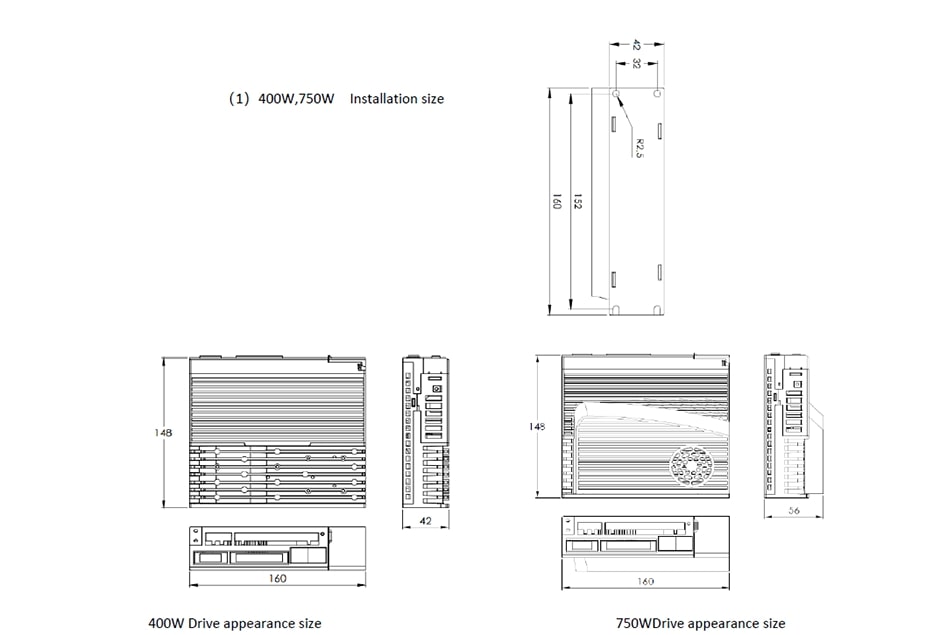
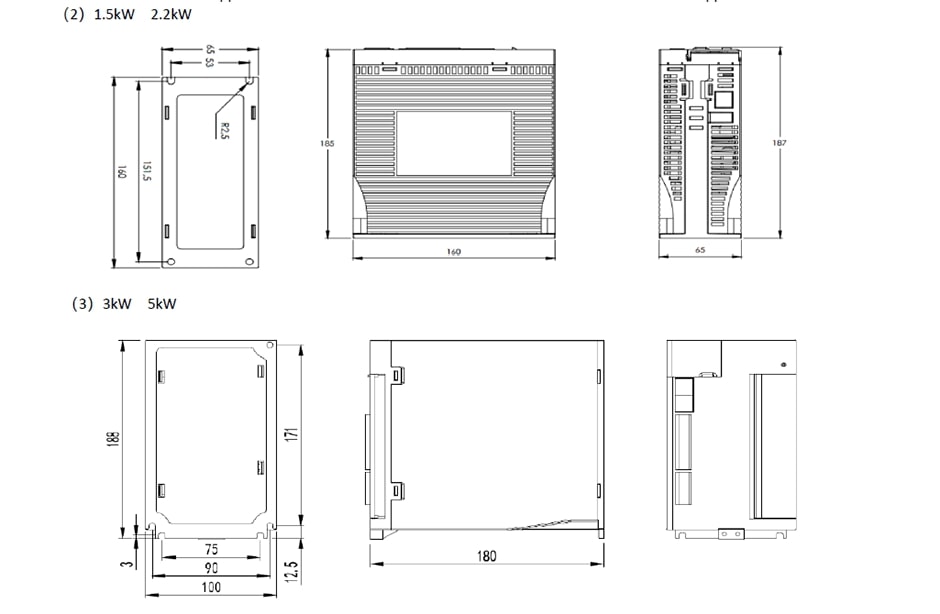
1. Leistungsbereich: 50W ~ 5 kW
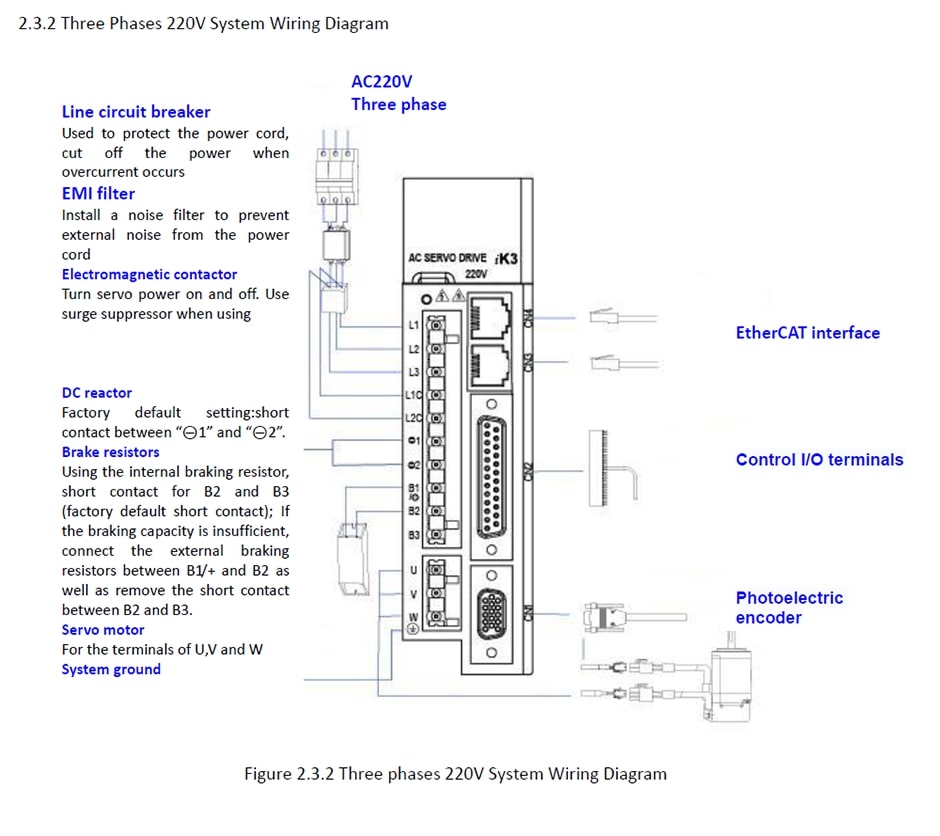
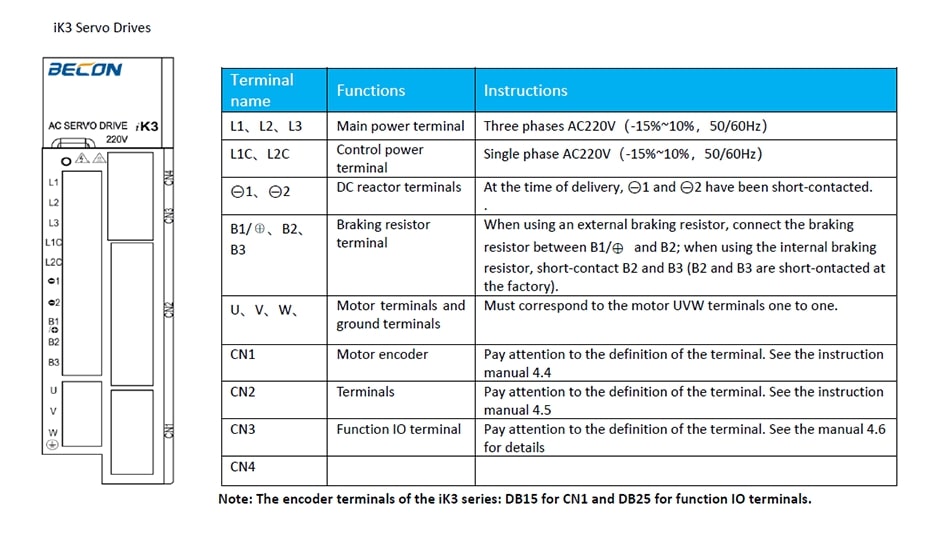
2. Eingangsspannung: einphasig oder dreiphasig 220VAC (- 15 ~ + 10%), 50 ~ 60 Hz
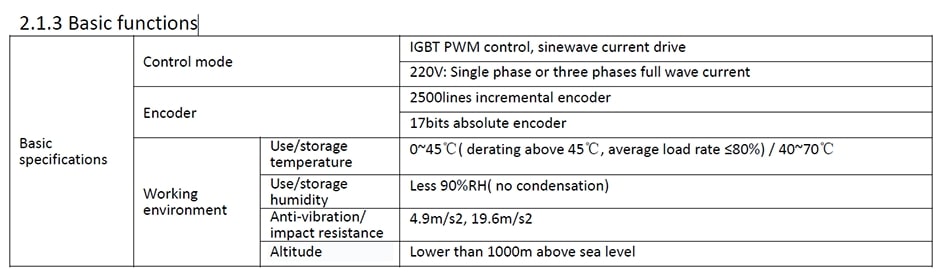
3. Steuermodus: Positionsregelung, Drehzahlregelung, Drehmomentregelung, Bussteuerung
4. Gebertyp: 2500C / T inkrementale photoelektrischen Geber (provinzieller / non provinzieller), 17bit / 20bit / 23Bit-Absolutwertgeber
5. Kommunikationsmodus: EtherCAT, Powerlink, CANopen
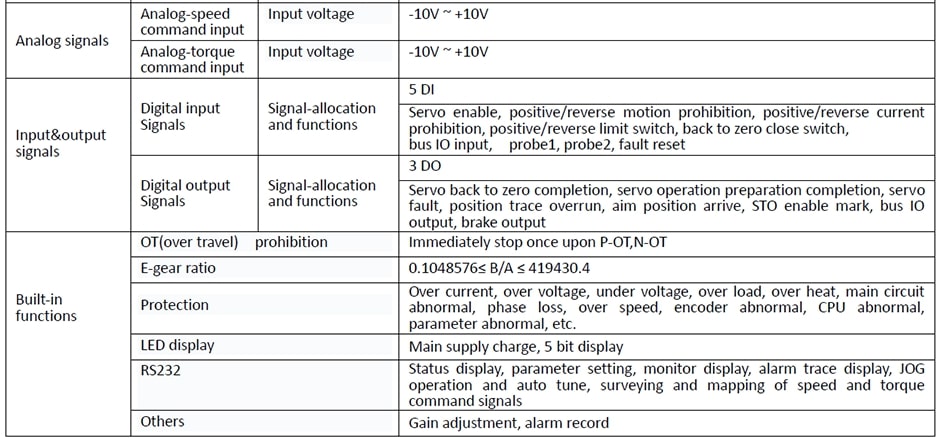
6. Die Eingangs- und Ausgangspunkte: IO programmierbarer, Unterstützung positive und negative Logik Einstellungen und Funktion Relocation, 5-Wege-Eingang Stützen 16 Funktionskonfigurationen, 3-Wege-Ausgangsstützen 12 Funktionskonfigurationen.
7. Funktionsüberwachung: bietet 16 Arten von Statusüberwachung wie Position, Geschwindigkeit, Strom, Spannung, Eingang und Ausgang.
3. Produktvorteile
1. Stromschleifenfrequenzantwort 2.5KHz ist, Geschwindigkeitsregelkreis-Frequenzgang ist 1,6 kHz, und die Kommunikationsrate 100 Mbps.
2. Mit einer Vielzahl von Subtraktion filtert die Steuerstabilität und unterstützt die Geschwindigkeitskurve Planung, Beschleunigungs- und Verzögerungseinstellungen und Beschleunigung und Verzögerung Filets eingestellt werden können, zu verbessern.
3. Ende Jitter-Unterdrückungsfunktion, Reibungskompensationsfunktion, Motorrastens Drehmomentkompensationsfunktion.
4. Es unterstützt schwache magnetische Kontrolle. In der High-Speed-und Schwachlastbetrieb Situation kann die Motordrehzahl weiter steigen.
5. Es unterstützt Parameter-Reset, selbstlernend, Tippen, Störhistorie Abfrage und Fehlerhistorie Rodung von verschiedenen Zusatzfunktionen.
6. Es unterstützt PC-Software von oberen Computer eingestellten Parameter (Upload, Download, Reset, Import und Export); Überwachung der Wellenform (es unterstützt das automatische Speichern von Wellenformen vor und nach dem Fehler, Aufrufen, Wiedergabe, Messanalysen, lineare Transformation FFT und Analyse von historischen Signaldaten im Fehlerfall); es unterstützt Servoposition, Drehzahl- und Drehmomentregelung, Start und Stopp, Vorwärts- und Rückwärtssteuerung. Fehler, Statusüberwachung, Diagnose und andere Operationen;
7. Stützservoantriebskommunikation mit unterschiedlichen Adressen;
8. Sicherheitsfunktion für den internationalen Standard entspricht, ist angebracht, sto / SS1 / SS2 / SBC, sicher und zuverlässig.
9. Es kann mit Hand-Bedientafel zur Parametrierung und Überwachung von Servo- und Motorzustand, so dass System-Debugging bequemer ausgestattet werden.