বি-6-2 আইকে সিরিজ, M2 বাস 380-400V


ছোট বিবরণ:
স্বয়ংক্রিয়ভাবে লোড নিষ্ক্রিয়তা যান্ত্রিক বৈশিষ্ট্য পরিমাপ অনুকূল লাভ সেট, এবং সিস্টেম চালু সময় কমান
ইউনিভার্সাল বাস আইকে সিরিজের সার্ভার ড্রাইভ
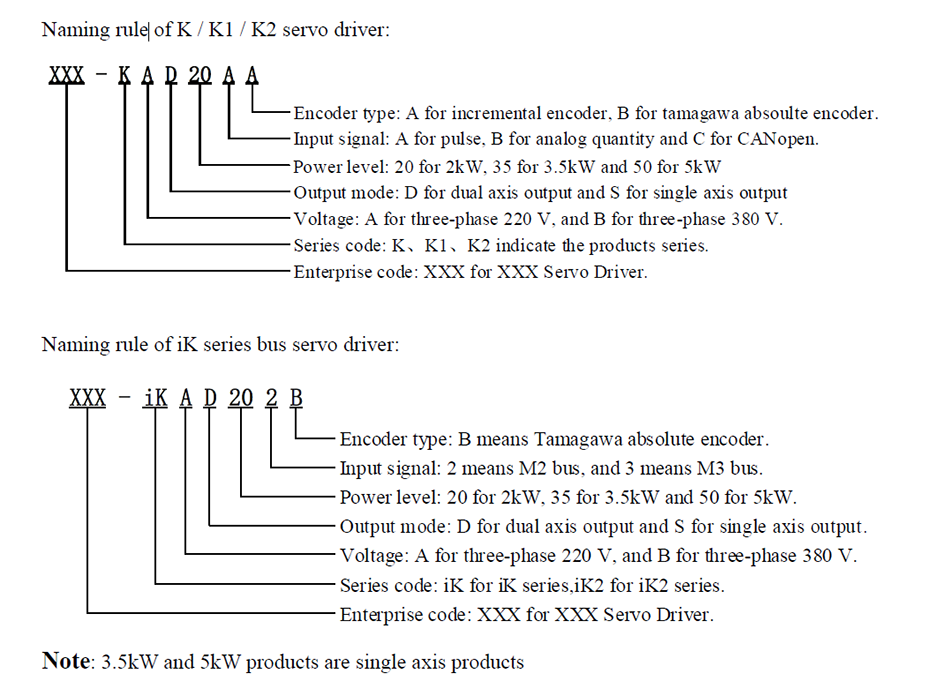
1. সার্ভার ড্রাইভ মডেল:
আইকে সিরিজ, M2 বাস 380-400V
ZSD-IKBS202B
ZSD-IKBS282B
ZSD-IKBS352B
ZSD-IKBS502B
2. কারিগরী ইনডেক্স
উচ্চ পর্যায়ের সার্ভার ড্রাইভ পণ্য, আইকে সিরিজের একটি উচ্চ পর্যায়ের মাল্টি ক্রিয়ামূলক এসি servo পরিকল্পিত এবং উচ্চ গতির, উচ্চ স্পষ্টতা, উচ্চ প্রতিক্রিয়া এবং আরও অনেক কিছু অপ্টিমাইজ গঠন, মধ্যম এবং উচ্চ শেষ বাজারে কোম্পানীর দ্বারা চালু ড্রাইভ। সাপোর্ট 220VAC বা 380VAC ইনপুট, সমর্থন মান Modbus প্রোটোকল CANopen বাস ও, M2, M3 বাস, বিল্ট-ইন সহজ পিএলসি ফাংশন। নির্ভরযোগ্যতা নকশা জাতীয় মান 4 সাক্ষাৎ বর্তমানে 0.4KW ~ 7.5kW শক্তি পরিসীমা আচ্ছাদন, একটি বৃহত্তর শক্তি পরিসর আছে।
উচ্চ-অর্ডার সার্ভার ড্রাইভ কম্প্যাক্ট গঠন, দুই শর আউটপুট সমর্থন করে। এটি একটি পরিবেশ বান্ধব এবং শক্তি সংরক্ষণ সার্ভার ড্রাইভ, 0.4KW ~ 1.5KW, অর্থনৈতিক, নির্ভরযোগ্য এবং স্থিতিশীল আউটপুট শক্তি সঙ্গে হল।
1. পাওয়ার সাপ্লাই ভোল্টেজ: 220V / 380V;
2. আউটপুট শক্তি: (? 2kw, 3.5kw, 5kW, 7.5kW) 220V (2kw, 2.8KW, 3.5kw, 5kW), 380V;
3. এনকোডার: 2500C / টি ক্রমবর্ধমান / প্রাদেশিক এনকোডার, 17bit / 20bit / 23bit পরম মান এনকোডার, আইকে সিরিজ শুধুমাত্র পরম মান সমর্থন করে;
4. ডিজিটাল আই সংকেত: 8 চ্যানেল ইনপুট এবং 6-চ্যানেল আউটপুট ফাংশন সেটিং এর জন্য ব্যবহার করা যেতে পারে;
5. এনালগ সংকেত: 2 ইনপুট;
6. কমিউনিকেশন মোড: 232, মানক Modbus প্রোটোকল CANopen বাস, যা আইকে সিরিজ MII প্রোটোকল সমর্থন করে;
3. প্রোডাক্ট সুবিধার
1. শক্তিশালী অভ্যন্তরীণ অবস্থান মোড সমৃদ্ধ গতি নিয়ন্ত্রণ ফাংশন অর্জনে বহু-পাথ একটানা অপারেশন পরিকল্পনা করতে পারেন; তথ্য পরিকল্পনা সর্বাধিক 32 গ্রুপ সমর্থিত যাবে, এবং তথ্য প্রতিটি চাহিদা অনুযায়ী ডাল সংখ্যা বা কোণ সাথে সেট করা যেতে পারে, এবং গতি, ত্বরণ, মন্দন এবং অভ্যন্তরীণ অবস্থান মোডের জরুরি অবস্থা মন্দন নির্ধারণ করা যাবে।
2. স্বয়ংক্রিয়ভাবে লোড নিষ্ক্রিয়তা যান্ত্রিক বৈশিষ্ট্য পরিমাপ অনুকূল লাভ সেট, এবং সিস্টেম চালু সময় কমান
3. মেকানিক্যাল অনুরণন ফ্রিকোয়েন্সি বিশ্লেষণ, খাঁজ ফিল্টার দুটি সেট দিয়ে সজ্জিত করা হয়, যা ফ্রিকোয়েন্সি (50 ~ 5000Hz) এবং খাঁজ গভীরতা নিয়ন্ত্রন করতে পারেন, কার্যকরীভাবে যান্ত্রিক শেষে কম ফ্রিকোয়েন্সি অনুরণন এবং কম্পন পরাস্ত, এবং কম্পন ফ্রিকোয়েন্সি সেট করতে পারেন (1 ~ 100hz) এবং কম্পন স্যাঁতসেঁতে।
4. ঘর্ষণ ক্ষতিপূরণ ফাংশন ঘূর্ণন সঁচারক বল reversing যান্ত্রিক সময় স্ট্যাটিক ঘর্ষণ প্রভাব কমানো ও কম গতির অপারেশন কর্মক্ষমতা নিম্নলিখিত কমান্ড উন্নত করতে পারেন।
5. ডিবাগ সফ্টওয়্যার সমর্থন, যান্ত্রিক বৈশিষ্ট্য বিশ্লেষণ, পরামিতি সেটিং পর্যবেক্ষণ এবং অন্যান্য ফাংশন, স্বজ্ঞাত এবং সহজ অপারেশন।