B-2-4 380-400v ຂັບ Absolute servo


ລາຍລະອຽດສັ້ນ:
ລະດັບພະລັງງານ: 50 W ~ ແຮງດັນ 2.0kw Input: ດຽວໄລຍະຫຼືສາມໄລຍະ 220VAC ແລະ 380VAC (- 15 ~ + 10%), 50 ~ 60Hz
Universal K1 ໄດຊຸດ servo
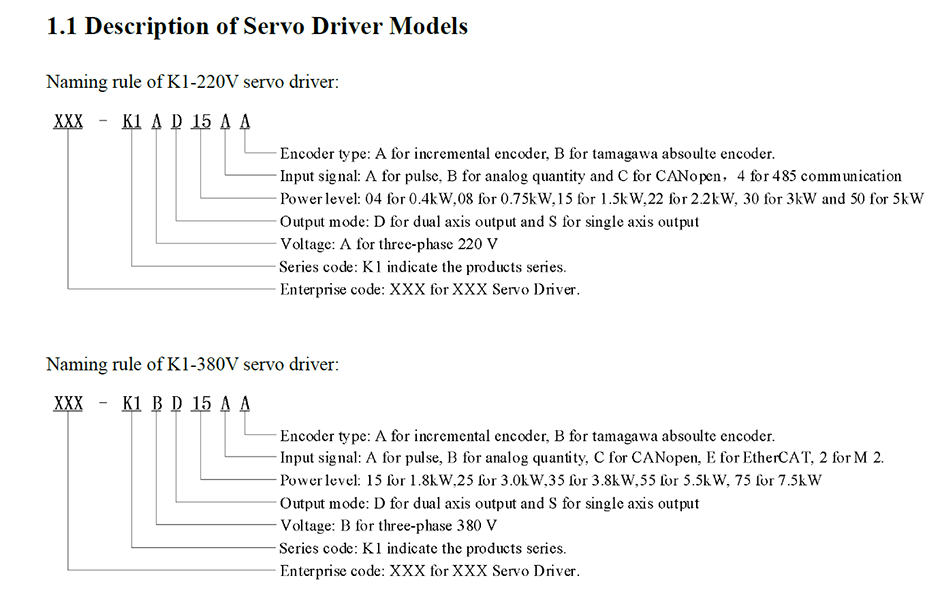
1. ຮູບແບບໄດ Servo:
380-400v Absolute servo ຂັບ
ZSD-K1BS30AB
ZSD-K1BS50AB
ZSD-K1BS75AB
2. ພາລາມິເຕີຂໍ້ມູນຈໍາເພາະ
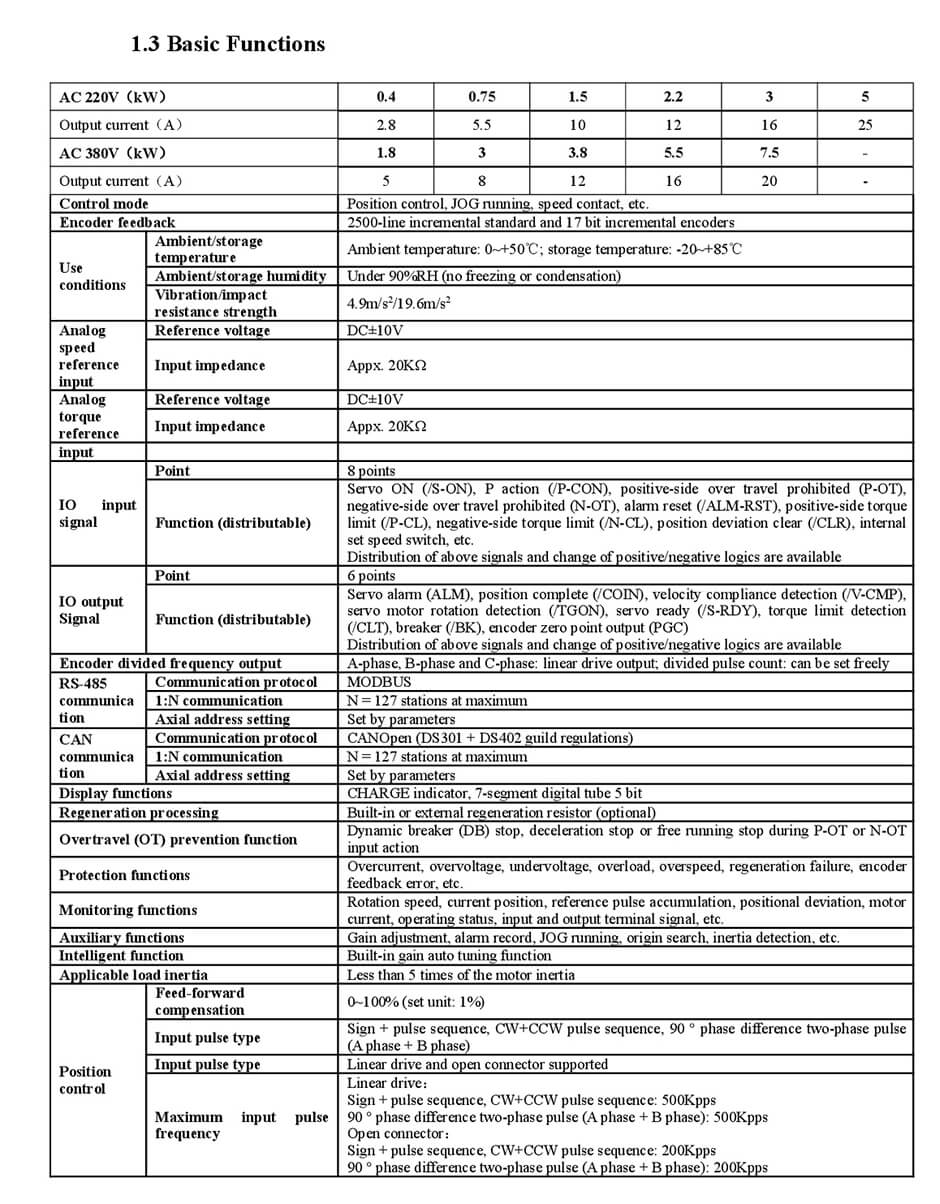
1. ພະລັງງານລະດັບ: 50 W ~ 2.0kw
2 ແຮງດັນ Input: ດຽວໄລຍະຫຼືສາມໄລຍະ 220VAC ແລະ 380VAC (- 15 ~ + 10%), 50 ~ 60Hz
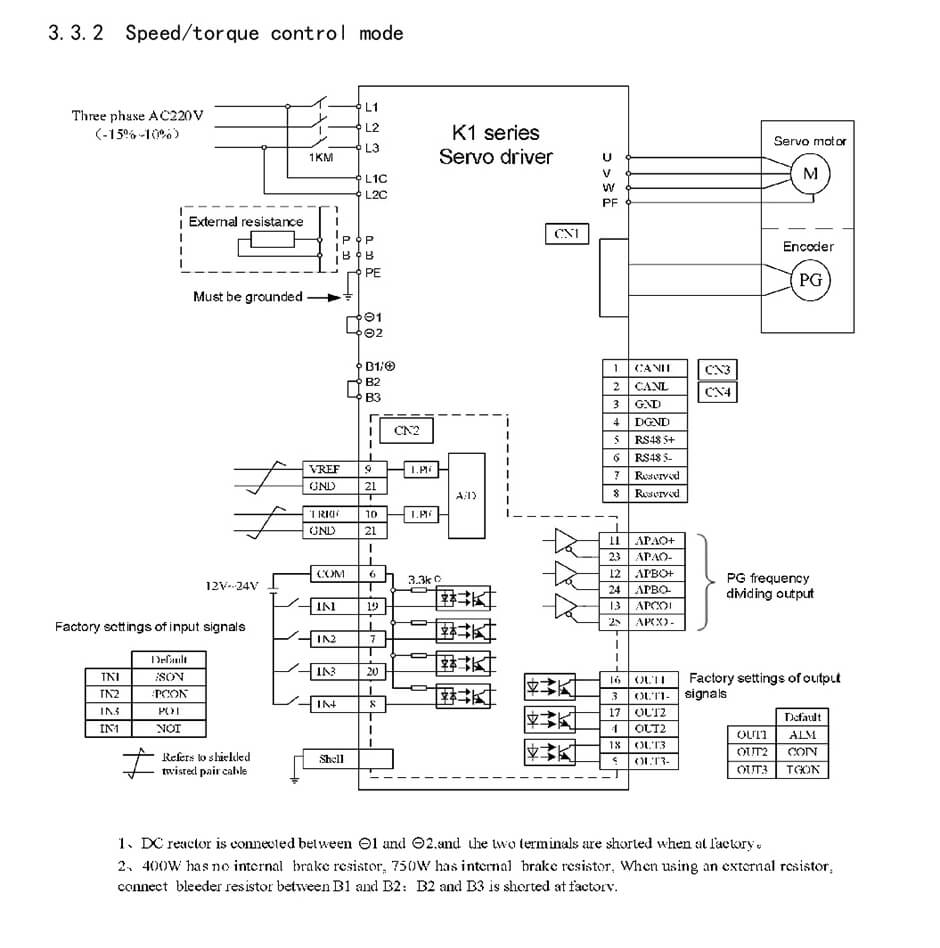
3. ການຄວບຄຸມຮູບແບບການ: ການຄວບຄຸມຕໍາແຫນ່ງ, ການຄວບຄຸມຄວາມໄວ, ການຄວບຄຸມ torque
ປະເພດ 4. Encoder: 2500C / T incremental photoelectric ເອັນໂຄດເດີ (ແຂວງ / ບໍ່ແຂວງ), 17bit, 23bit ລະບົບພາສາຢ່າງແທ້ຈິງ
5. ຮູບແບບການສື່ສານ: RS485, RS232, CANopen, ມາດຕະຖານ Modbus Communication
6. Input ແລະຜົນຜະລິດຈຸດ: IO ໂປລແກລມ, ສະຫນັບສະຫນູນໃນທາງບວກແລະການຕັ້ງຄ່າຕາມເຫດຜົນໃນທາງລົບແລະການຍົກຍ້າຍຫນ້າທີ່, 4 ວິທີການປ້ອນຂໍ້ມູນສະຫນັບສະຫນູນ 16 ການຕັ້ງຄ່າທີ່ເປັນປະໂຫຍດ, 3 ວິທີການສະຫນັບສະຫນູນ 12 ຜົນຜະລິດການຕັ້ງຄ່າທີ່ເປັນປະໂຫຍດ.
7. ປະຕິບັດແລະການສະແດງ: tube Nixie 5 ໃນຫນຶ່ງ, 5 ປຸ່ມ
3 ລັກສະນະຜະລິດຕະພັນ
1. ຮູບແບບການຕໍາແຫນ່ງພາຍໃນຄວາມຍືດຫຍຸ່ນສູງສາມາດຮັບຮູ້ຫນ້າທີ່ຄວບຄຸມການເຄື່ອນໄຫວອຸດົມສົມບູນ. ພາຍໃຕ້ຮູບແບບການສື່ສານ 485, ມັນສະຫນັບສະຫນູນເຖິງ 32 ກຸ່ມການວາງແຜນຂໍ້ມູນ, ແລະສະຫນັບສະຫນູນກຸ່ມຂໍ້ມູນການທໍາງານຂອງເຄື່ອງມືເອເລັກໂຕຣນິກ. ກຸ່ມຂອງຂໍ້ມູນແຕ່ລະຄົນສາມາດໄດ້ຮັບການກໍານົດທີ່ມີຈໍານວນຫຼືມຸມຂອງກໍາມະຈອນເຕັ້ນຕາມຄວາມຕ້ອງການໄດ້.
2. ຮູບແບບການ motion ຢ່າງແທ້ຈິງຫຼືຮູບແບບການ motion ພີ່ນ້ອງສາມາດກໍານົດໄວ້, ຄວາມໄວ, ເລັ່ງ, deceleration ແລະ deceleration ສຸກເສີນຂອງຮູບແບບຕໍາແຫນ່ງພາຍໃນສາມາດກໍານົດໄວ້, ແທ້ຈິງທີ່ໃຊ້ເວລາການປັບເພີ່ມອັດຕະໂນມັດ, ການວັດແທກອັດຕະໂນມັດຂອງລັກສະນະກົນຈັກຂອງ inertia ໂຫຼດ, ການຕັ້ງຄ່າເພີ່ມ servo ຕ້ອງ, ການຕັ້ງຄ່າຮັບທີ່ດີທີ່ສຸດອີງຕາມການຜົນໄດ້ຮັບການກໍານົດອັດຕະໂນມັດ inertia, ລະບົບອົງທີ່ໃຊ້ເວລາວ່າຈ້າງ, ແລະການປັບປຸງການສະກັດກັ້ນການສັ່ນສະເທືອນສາມາດກໍານົດໄວ້.
3. ການວິເຄາະຄວາມຖີ່ resonance ກົນ, ໂດຍມີສອງຊຸດຂອງການກັ່ນຕອງ notch, ເຊິ່ງສາມາດປັບຄວາມຖີ່ຂອງການ (50 ~ 5000Hz) ແລະຄວາມເລິກ notch, ປະສິດທິພາບເອົາຊະນະ resonance ຄວາມຖີ່ຕ່ໍາແລະການສັ່ນສະເທືອນຢູ່ໃນຕອນທ້າຍຂອງກົນຈັກ, ແລະສາມາດກໍານົດຄວາມຖີ່ການສັ່ນສະເທືອນ (1 ~ 100Hz) ແລະການສັ່ນສະເທືອນເຮັດໃຫ້ຫົດຫູ່.
4. Friction ຫນ້າຊົດເຊີຍ torque ສາມາດຫຼຸດຜ່ອນອິດທິພົນຂອງ friction ຄົງທີ່ໃນໄລຍະກົນໄກການຫັນປ່ຽນ, ປັບປຸງຄໍາສັ່ງການປະຕິບັດຂອງການດໍາເນີນງານຄວາມໄວຕ່ໍາດັ່ງຕໍ່ໄປນີ້, ແລະກໍານົດຂະຫນາດໂຫຼດ friction ແລະ Hysteresis ໄວ.
5. ປະສິດທິພາບຄ່າໃຊ້ຈ່າຍທີ່ສູງຂຶ້ນ. K1 ຂັບຊຸດ servo ມີຫນ້າທີ່ທັງຫມົດຂອງ K2 ຊຸດ. ວັດສະດຸປ້ອນແລະຜົນຜະລິດທີ່ Port IO ແລະເອັນໂຄດເດີຮັບຮອງເອົາ terminal DB, ທີ່ມີປະສິດທິພາບຄ່າໃຊ້ຈ່າຍທີ່ສູງຂຶ້ນ.
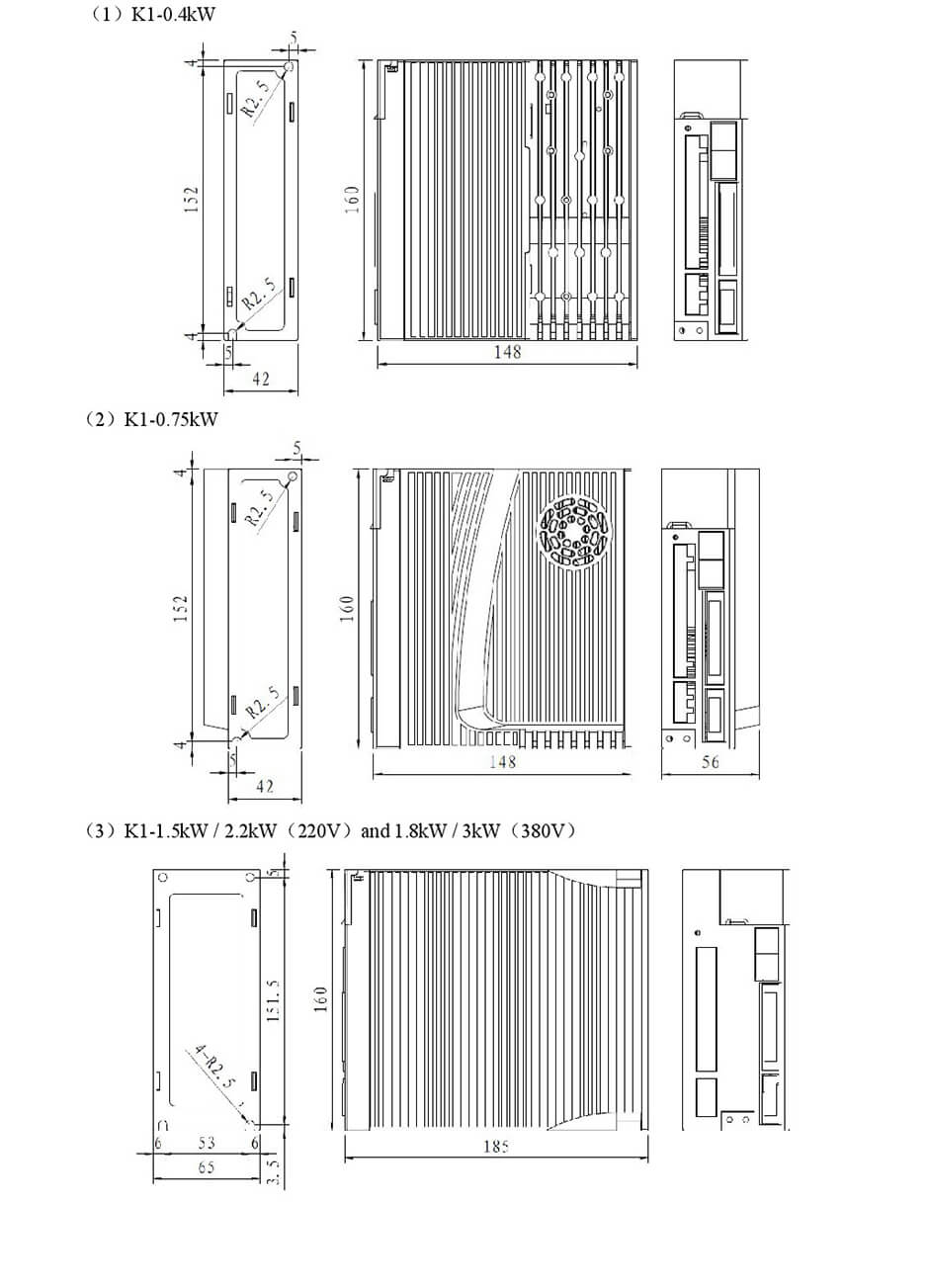
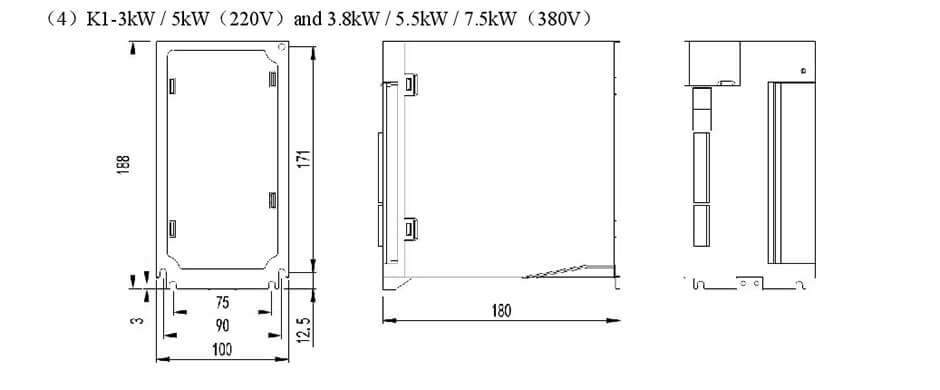
6. ຂະຫນາດຂະຫນາດນ້ອຍ, ໂຄງປະກອບການຂະຫນາດເລັກຢ່າງຫຼວງຫຼາຍປະຢັດຊ່ອງການຕິດຕັ້ງ
ຄໍາຮ້ອງສະຫມັກອຸດສາຫະກໍາ
ມີໂຄງປະກອບການຂະຫນາດເລັກແລະປະສິດທິພາບທີ່ດີເລີດ, K1 ຂັບຊຸດ servo ສາມາດໄດ້ຮັບການນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນເຄື່ອງມືເຄື່ອງ CNC, ອຸດສາຫະກໍາສຸຂະພາບ, ການຫມູນໃຊ້, ພິມແລະອຸດສາຫະກໍາ dyeing, ເຄື່ອງແກະສະຫລັກ, ອຸດສາຫະກໍາການຫຸ້ມຫໍ່, ແລະອື່ນໆ