1. System description
Wire cutting machine is mainly used in die manufacturing industry and rough machining industry of mechanical parts. In the widely used reciprocating wire EDM machine tools in our country, the driving unit of worktable mostly adopts stepping motor system. Because of the reason of stepping motor itself, the improvement of machining accuracy, running speed and performance of WEDM is greatly affected, which restrains its development. The application of servo motor can improve the machining accuracy, speed and process control. In this system, the control mode of the servo driver is pulse + direction under the position mode. The control card inside the computer sends out pulse and direction signals to control the speed of the motor’s forward and reverse rotation and rotation, and the amount of movement, so as to make the driving table move according to the processing requirements.
2. Servo requirements of WEDM
The system is composed of a set of K1 series servo driver and servo motor, as shown in the following figure

3. Introduction to industry matching performance
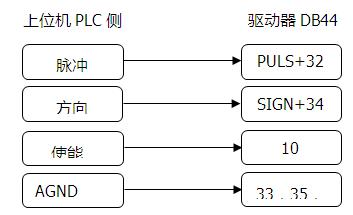
The host computer is connected with the control end of the servo driver, and the control mode is pulse + direction in the position mode. The wiring between the host computer and the system is as follows:
4.Application debugging of Huada servo motor LB series and K1 servo driver on-line cutting machine
1、Servo drive and motor configuration
| Device Model | Wire cutting machine |
| Drive model | K1 series servo driver |
| Adaptive motor | K1AS08AA drive with 80ST-02430LF1B motor |
2、Related parameter settings
⑴Electronic gear ratio setting
Reciprocal of target value to the actual value ratio
⑵Position loop scale
The proportion of the position loop directly determines the reaction speed of the position loop. On the premise that the mechanical system does not produce vibration or noise, increase the gain of the position loop to speed up the system response. Reduce positioning error and shorten positioning time. However, mechanical vibration and system position overshoot may be caused by excessive vibration.
⑶Speed loop proportional gain
When the gain value is increased, the speed responsiveness can be improved. But if the setting is too large, it is easy to produce vibration and noise
⑷Integral time constant of velocity loop
When this parameter is reduced, the speed responsiveness can be improved and the speed control error can be reduced. However, if the setting is too small, it is easy to generate vibration and noise, the greater the parameter, the worse the rigidity.
⑸Input instruction reversal
Reverse the input instruction
0: do not reverse
1: Reverse
⑹Input IO port relocation
Post time: Mar-04-2020