200-220v controlador absoluto servo


Breve descripción:
Tensión de alimentación: 220 V; Potencia de salida: 220V (0,4 kW, 0.75KW, 1,5 KW); Encoder: 2500C / T incrementales / codificador provincial, 17bit / 20bit / 23bit encoder valor absoluto;
universal, K2 servomandos de la serie
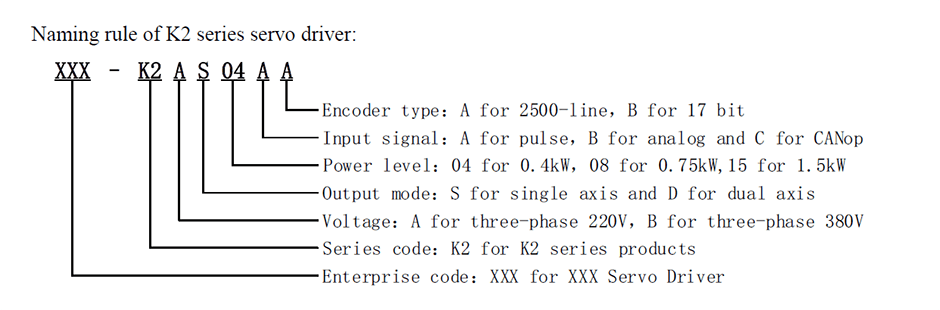
1. Servo modelo de la unidad:
unidad K2 Serie servo
200-220v controlador absoluto servo
ZSD-K2AS04AB
ZSD-K2AS08AB
ZSD-K2AS15AB
ZSD-K2AS22AB
ZSD-K2AS30AB
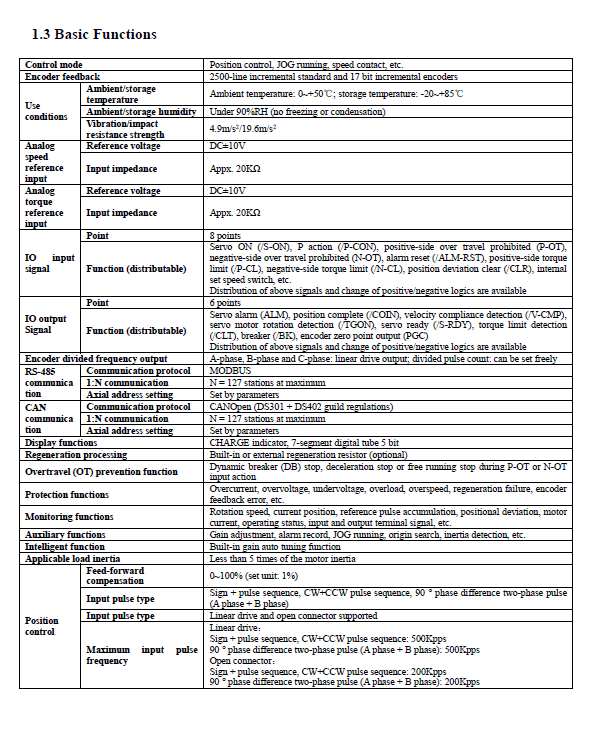
2. Parámetros técnicos:
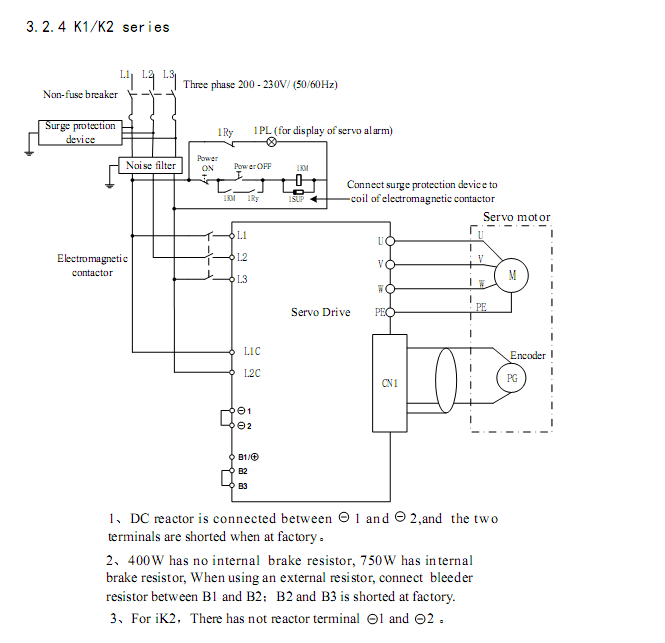
1. Tensión de alimentación: 220 V;
potencia 2. Salida: 220V (0,4 kW, 0.75KW, 1,5 KW);
3. Codificador: 2500C / T encoder incremental / provincial, 17bit / 20bit / 23bit encoder valor absoluto;
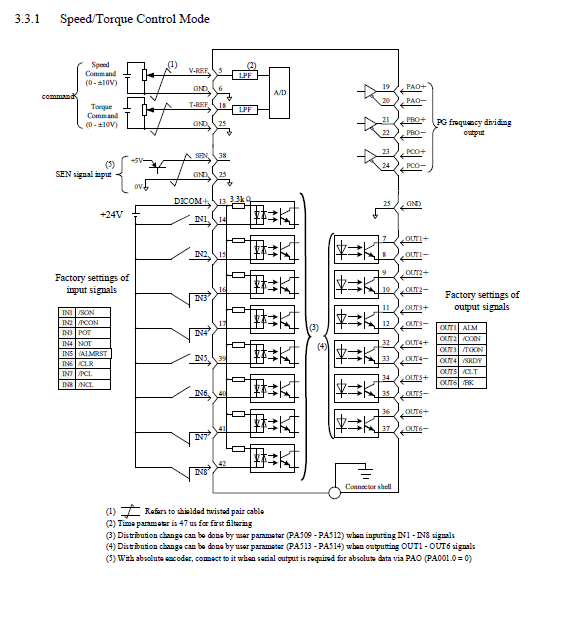
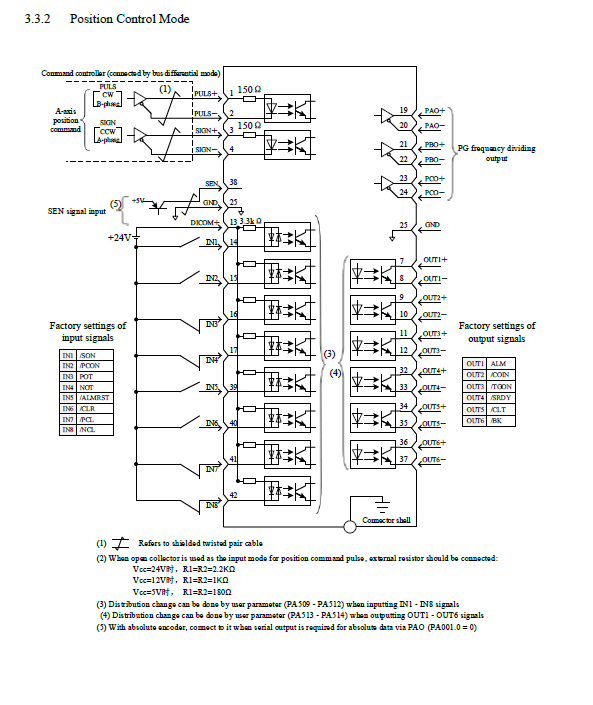
4. IO digital de señal: entrada de 8 canales y 6 canales de salida se puede utilizar para el ajuste de la función;
5. señal analógica: 2 entradas;
6. Modo de comunicación: RS232, protocolo Modbus estándar, bus CANopen;
3. Ventajas del producto:
1. Modo de posición interna de gran alcance puede planificar multi-ruta de funcionamiento continuo para lograr las funciones de control de movimiento ricos; que puede soportar hasta 32 grupos de planificación de datos, y cada grupo de datos puede establecer el número o el ángulo de pulsos de acuerdo con la demanda, y se puede establecer la velocidad, la aceleración, la desaceleración y la desaceleración de emergencia de modo de posición interna;
2. medir automáticamente las características mecánicas de inercia de la carga, establecer la ganancia óptima, y acortar el sistema de tiempo de depuración;
3. Análisis de frecuencia de resonancia mecánica, equipado con dos conjuntos de filtros de muesca, que puede ajustar la frecuencia (50 ~ 5000Hz) y profundidad de la muesca, de manera efectiva superar la resonancia de baja frecuencia y la vibración en el extremo mecánica, y puede establecer la frecuencia de vibración ( 1 ~ 100 Hz) y amortiguación de las vibraciones;
4. La fricción de par función de compensación puede reducir la influencia de la fricción estática durante la mecánica de marcha atrás y mejorar el siguiente comando rendimiento de funcionamiento a baja velocidad;
5. soporte de software de depuración, análisis mecánico características, ajuste de parámetros, monitoreo y otras funciones, manejo intuitivo y simple. 二, parámetro Especificación