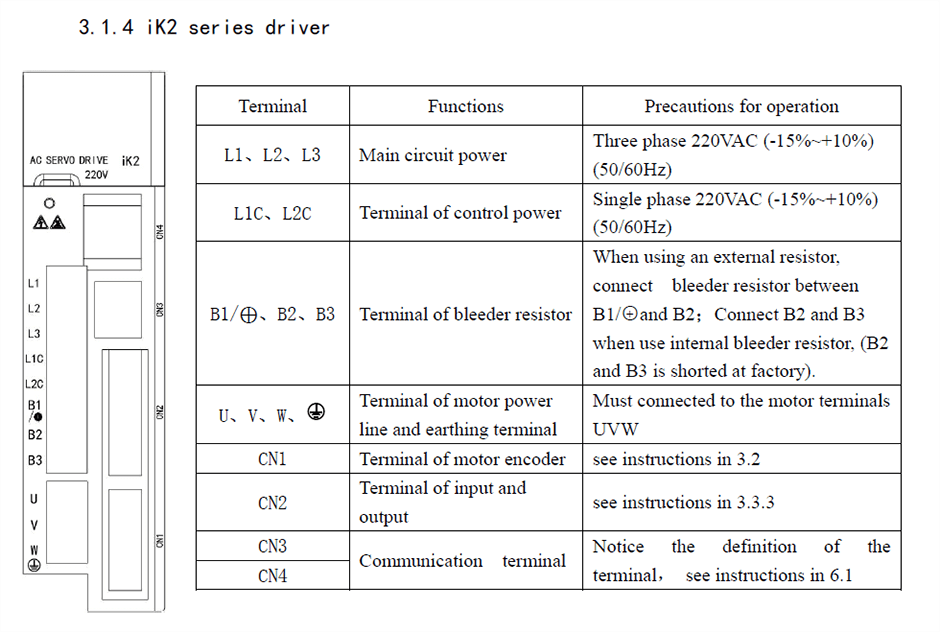
B-7-2 IK Cyfres M3 200-220V Bws



Disgrifiad byr:
Gall Mechatrolink fod hyd at 100 Mbps. Gall newid dull rheoli ar-lein, yn enwedig yn addas ar gyfer synchronization, rhyngosod a swyddogaethau eraill rhwng siafftiau. gall fod yn hawdd ymdrin â'r mudiad mecanyddol gyda gofynion rheoli cymhleth a sylweddoli pellter hir, echel aml-waith cydamserol.
Universal IK2 bws gyrru gyfres servo
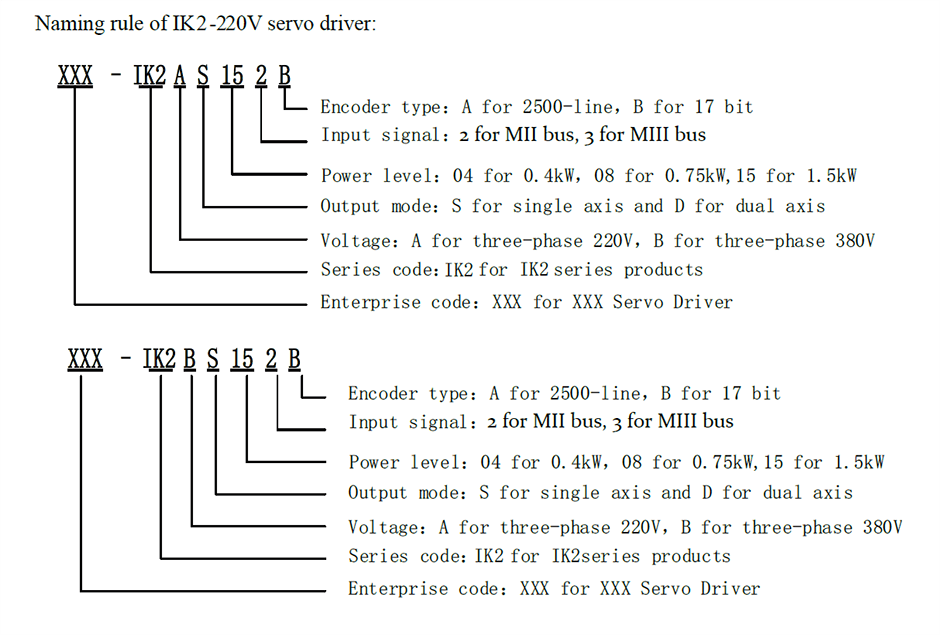
1. Model gyrru servo:
IK Cyfres 200-220V Bws M3
ZSD-IK2AS083B
ZSD-IK2AS153B
ZSD-IK2AS223B
ZSD-IK2AS303B
ZSD-IK2AS503B
2. mynegeion technegol
1. Pŵer foltedd cyflenwi: 220V;
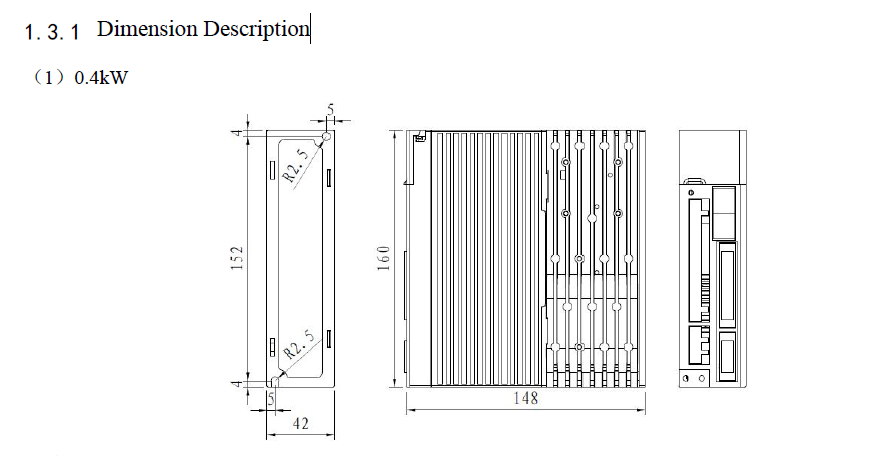
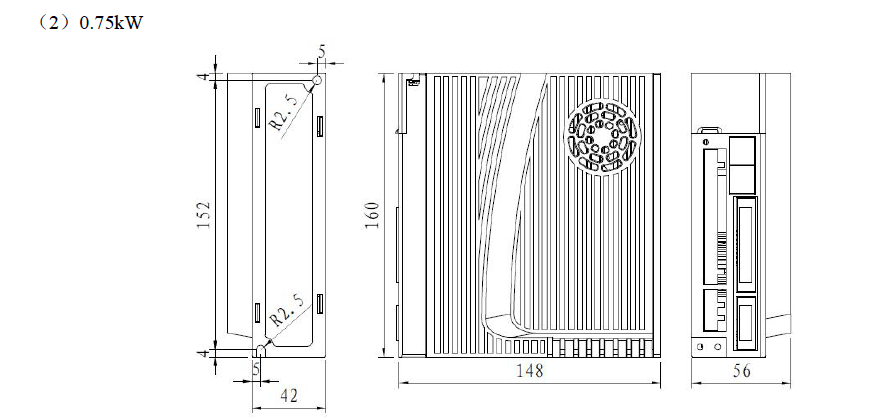
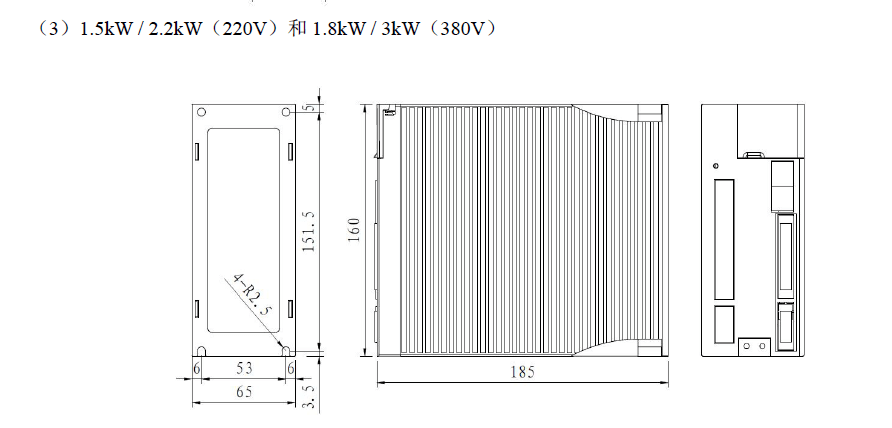
2. Allbwn pŵer: 0.4KW, 0.75KW, 1.5kW;
3. Encoder: 17bit / 20bit / 23bit encoder gwerth absoliwt;
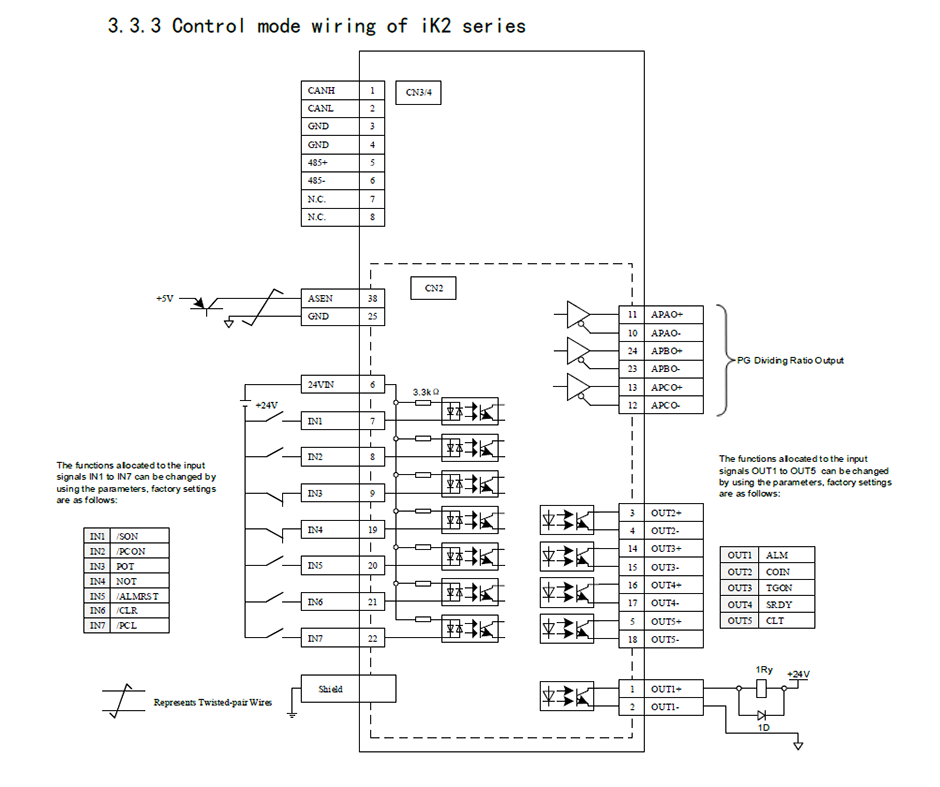
4. IO Digidol signal: mewnbwn 8-sianel a 6-sianel Gall allbwn yn cael ei ddefnyddio ar gyfer gosod swyddogaeth;
5. Analog signal: 2 mewnbynnau;
6. Modd Cyfathrebu: RS232, protocol Modbus safonol, bws CANopen, MIII (M3) protocol
3. Manteision Cynnyrch
1. Gall Mechatrolink fod hyd at 100 Mbps. Gall newid dull rheoli ar-lein, yn enwedig yn addas ar gyfer synchronization, rhyngosod a swyddogaethau eraill rhwng siafftiau. gall fod yn hawdd ymdrin â'r mudiad mecanyddol gyda gofynion rheoli cymhleth a sylweddoli pellter hir, echel aml-waith cydamserol.
2. Gall dull sefyllfa mewnol pwerus cynllunio aml-lwybr gweithredu parhaus i gyflawni swyddogaethau rheoli cynnig cyfoethog; gall gefnogi hyd at 32 o grwpiau cynllunio data, a gall pob grŵp o ddata yn cael eu gosod gyda rhif pwls neu ongl yn ôl y galw, a gall osod cyflymder, cyflymiad, arafu a arafiad argyfwng modd sefyllfa mewnol;
3. Awtomatig mesur nodweddion mecanyddol inertia llwyth, yn gosod y cynnydd gorau posibl, ac yn byrhau y system debugging amser;
4. Dadansoddiad amledd cyseiniant Mecanyddol, offer gyda dwy set o hidlwyr radd, a all addasu pa mor aml (50 ~ 5000Hz) a dyfnder radd, yn effeithiol oresgyn y cyseiniant isel-amledd a dirgryniad yn y pen mecanyddol, ac yn gallu gosod y amledd dirgryniad ( 1 ~ 100Hz) a dirgrynu dampio;
5. Gall y ffrithiant torque swyddogaeth iawndal yn lleihau dylanwad ffrithiant sefydlog yn ystod mecanyddol wrthdroi a gwella r yn canlyn archa perfformiad gweithredu gyflymder isel;
6. cefnogaeth meddalwedd Debugging, mecanyddol dadansoddi nodweddion, gosod paramedr, monitro a swyddogaethau eraill, gweithredu sythweledol a syml.